سنکرون کردن سرو موتورها

معنی سنکرون چیست؟
سنکرون کردن به معنی ارتباط دو یا چندین سرو موتور بصورت همزمان است. بطوریکه موتورها با سرعت یکسان و یا با نسبتی مشخص در یک جهت و یا دو جهت متفاوت در حال کار باشند. به نحوی که تغییر سرعت در یکی از سرووها که از آن بعنوان Master یاد می شود. باعث پیروی و تبعیت سرعت و موقعیت در سایر سرو موتورها گردد.
کاربرد موتور سنکرون چیست؟
در بعضی از کاربردها نیاز به سنکرون کردن چند موتور وجود دارد که از مرسوم ترین کاربردها می توان به موتورهای راهبر جرثقیل های سقفی اشاره کرد. در جرثقیلهای سقفی دو موتور همزمان به یک کنتاکتور اصلی یا اینورتر با توان 2 برابر متصل می شوند، تا دو موتور با یک سرعت یکسان جابجایی کل جرثقیل را انجام دهند.
سنکرون کردن در مورد سروموتورها عمدتاً درماشین آلات CNC نظیر CNC چوب، برش، پلاسما و …. است.
این گونه ماشین آلات دارای محورهایی هستند که به آنها Gantry در اصطلاح اتلاق می گردد.
و برای حرکت همزمان این محورها از روش سنکرون کردن سروو ها استفاده می گردد.
شرکت بارمان اتوماسیون سایا نمایندگی فروش محصولات دلتا می باشد و در زمینه فروش اینورتر در اصفهان، نمایندگی سروو دلتا و همچنین تعمیر اینورتر در اصفهان و سایر تجهیزات اتوماسینون صنعتی در اصفهان و سراسر ایران فعالیت می کند.
آموزش روش های سنکرون کردن:
- ساده ترین روش برای سنکرون کردن سرو موتور استون اتصال آنها به یک منبع حرکتی است. بطور مثال زمانی که سروها در مد Position در حال کار می باشند. اگر آنها به یک منبع پالس مشترک متصل گردند و تعداد و فرکانس پالسهای دریافتی یکسان بوده و بسته به تنظیمات پارامترهای موتور نظیر جهت گردش و ضریبهای گیربکس الکترونیکی حرکت موتورها سنکرون می شود. همین روش در مد کنترل Speed نیز مرسوم می باشد ( جایی که غیر همزمانی جزیی قابل اغماض باشد)
- روش دیگر، استفاده از شبکه های صنعتی CAN ,Ether Cat، Modbus است. در این روش کنترلر بطور همزمان فرکانس و موقعیت مورد نیاز سرو موتور ها رادر بافر فرکانس، فرکانس و موقعیت سروها قرار می دهد. بدیهی است اگر مقدار قرار گرفته شده یکسان باشد سرووها بصورت همزمان کار خواهند کرد.
- استفاده از سرو موتور های سری ETS در مدلهای 2 تایی و 3 تایی برند ESTUN:
در این روش تنها با تغییر چند پارامتر بدون نیاز به سیم کشی، سرووها با هم سنکرون می شوند. بطوریکه یکی از موتورها بعنوان Master بوده و با ارسال فرمان به سرووموتور Master از طریق کنترلر سرووموتورها ی Slave نیز با توجه به تنظیمات شروع به حرکت می کنند. سرو موتور Master می تواند در مد Position و یا شبکه CAN و Modbus کنترل شود.
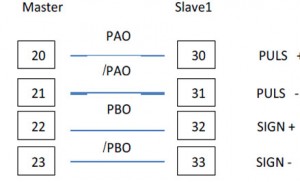
- استفاده از پالسهای انکدر خروجی درایوها:
در روش master-slave خروجی پالس انکدر سروو Master به ورودی پالس سروو Slave اول متصل می گردد. این قضیه برای بقیه سروهای Slave نیز وجود دارد.
بطوریکه خروجی پالس انکودر سروو Slave اول، به ورودی پالس Slave دوم متصل می شود.
شکل زیر نحوه اتصال به سروو موتور Estun سری pronet را نمایش می دهد.
در این روش سروهای Slave در مد کنترلی position و سروو Master امکان کار در تمام مدهای کنترلی را دارد.
نکات کلیدی :
تنظیمات پارامترهای PID ( pid کنترل با اینورتر ) جزء مهمی از روش اتصال همزمان است. چرا که در بعضی از کاربردها سرووهای سنکرون شده اگر دارای سرعت یکسان نباشند. برروی یکدیگر بار مضاعف ایجاد خواهند کرد. لذا باید سرعت پاسخ در حد مطلوب باشد و در عین حال باعث تنشهای اضافی به موتور نشود.





چقد خوبین شما