سروو موتور دلتا A2





کاتالوگ فارسی سروو موتور دلتا A2

دانلود کتاب آموزش سروو موتور دلتا A2
آشنایی با سروو درایو دلتا A2
کلمه سروو از کلمه یونانی Servant آمده، به این معنا که مانند یک خادم مطيع دستورات بوده و آنها را با دقت و سرعت به انجام می رساند. این سیستمها جهت کنترل مقدار دقیق جابجایی، سرعت و شتاب و گشتاور تجهیزات مکانیکی حرکتی استفاده می شوند. قصد داریم شما را با قابلیت های سروو درایو دلتا A2 در این یادداشت آشنا کنیم. با ما همراه باشید تا با مفهوم موتور سروو دلتا A2 چیست بیشتر آسنا شویم.
البته سیستم های سرو تنها مکانیزم های موجود جهت انتقال نیرو و حرکت نیستند، بلکه مکانیزم های هیدرولیک، نیوماتیک و موتورهای AC و DC عادی هم در این مقوله شریک هستند.
اگر علاقه دارید قبل از خرید سروو موتور با ساختار، انواع و کاربردهای آن آشنا شوید، در ادامه با ما همراه باشید.
انواع موتورها:
این موتورها به چهار دسته تقسیم می شوند:
- موتور جریان متناوب AC Servo Motor
- موتور پله ای Stepper Motor
- موتورهای جاروبک دار (AC , DC ( Brush Motor
- موتور جریان مستقیم DC Servo Motor
موتور
سروو موتور چیست؟ اصولا موتورهایی که در کاربردهای کنترل موقعیت مورد استفاده قرار می گیرند، سروموتور نامیده می شوند.
سروموتور که گاهی به نام موتور کنترل از آن یاد می شود، طوری طراحی و ساخته میشود که بتوان از آن در سیستم های کنترل فیدبک استفاده نمود. توان اسمی این موتورها بین چند دهم وات تا چند صد وات می باشد.
پاسخ سرعت این موتورها بسیار زیاد است، لذا باید اینرسی (لختی) آنها کم باشد و در نتیجه، قطر این ماشینها کم ولی طول آنها نسبتا زیاد است. از این موتورها در سیستمهای رادار، روبات، کامپیوتر و ماشینهای افزار استفاده می شود. انواع سروو موتور به دو گروه زیر تقسیم بندی می شوند.
انواع سروو موتور:
- موتورهای DC
- موتورهای AC
سروموتورهای DC
سرو موتورهای DC در حقیقت یک موتور DC با تحریک جداگانه یا موتور DC با قطبهایی از آهنربای دائم است. شکل ۱ شمای یک سروموتور DC از نوع تحریک جداگانه را نشان میدهد. اصول اصلی عملکرد این سروموتور شبیه موتورهای DC معمولی است. سروموتورهای DC عمدتا توسط ولتاژ آرمیچر کنترل می شوند.
آرمیچر در این موتورها خطی بوده و شیب منفی نسبتا زیادی دارد (شکل 3). باید دانست در ماشینهای DC نیروی محرکه مغناطیسی (mmf) آرمیچر و mmf مدار تحریک متعاملند، لذا تغییرات پله ای در ولتاژ آرمیچر (یا جریان) باعث میشود که در موقعیت یا سرعت چرخش روتور تغییر سریع بوجود بیاید.
سرو درایو AC
توان اسمی موتورهای DC از چند وات تا چند صد وات می باشد. در حقیقت، موتورهای با توان اسمی بالا از نوع DC هستند. امروزه در توان های کم از موتورهای AC استفاده میشود. موتورهای AC بسیار مقاوم بوده و اینرسی (لختی) آنها نیز کم است، اما باید متذکر شد که موتورهای AC غیر خطی هستند و مشخصه های گشتاور سرعت آنها بخوبی و ایده الی موتورهای DC نمی باشد.
باید بدانید که گشتاور موتورهای AC از گشتاور موتورهای DC با توان اسمی یکسان کمتر است. اکثر موتورهای AC که در سیستم های کنترل مورد استفاده قرار می گیرند از نوع موتورهای القایی دوفاز با روتور قفس سنجابی میباشند. شکل ۴ شمای موتورهای AC دوفاز را نشان می دهد. در این موتورها استاتور حاوی دو سیم پیچ است که در طول استاتور درون شیارها توزیع و گسترده شده اند. این دو سیم پیچ به قرار زیر تشریح می شوند.
– سیم پیچ اول که به سیم پیچی مرجع یا سیم پیچی فاز ثابت معروف است و به منبع ولتاژ ثابت 4 متصل می باشد.
انتخاب سرو موتور دلتا
برای انتخاب سروو درایو دلتا به چارت زیر توجه کنید همچنین می توانید با نمایندگی سروو موتور دلتا سری A2 جهت راهنمایی های لازم تماس بگیرید.
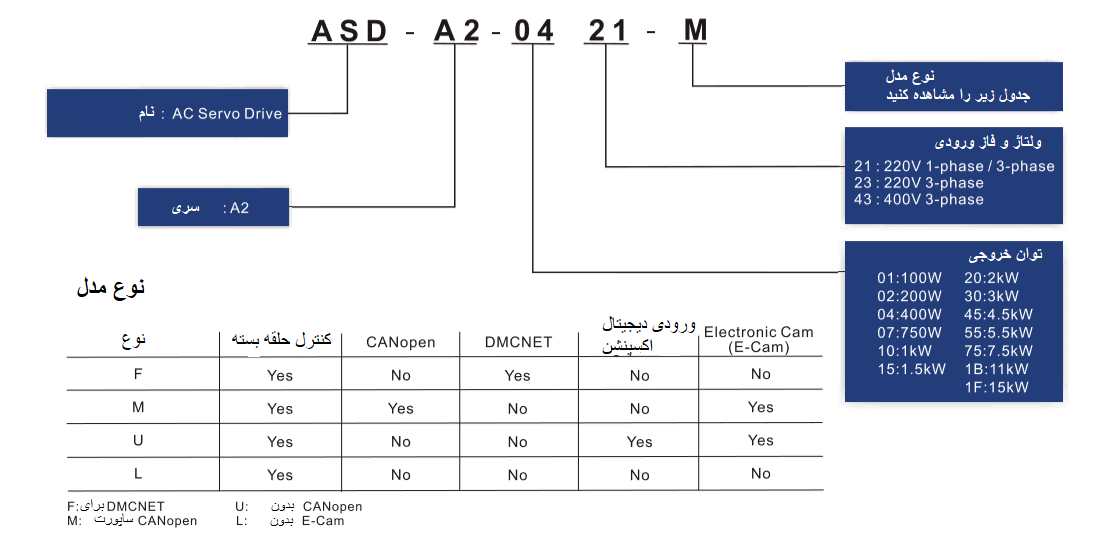
شکل 1:معرفی انواع سروو موتور دلتا A2
انتخاب موتور سرو
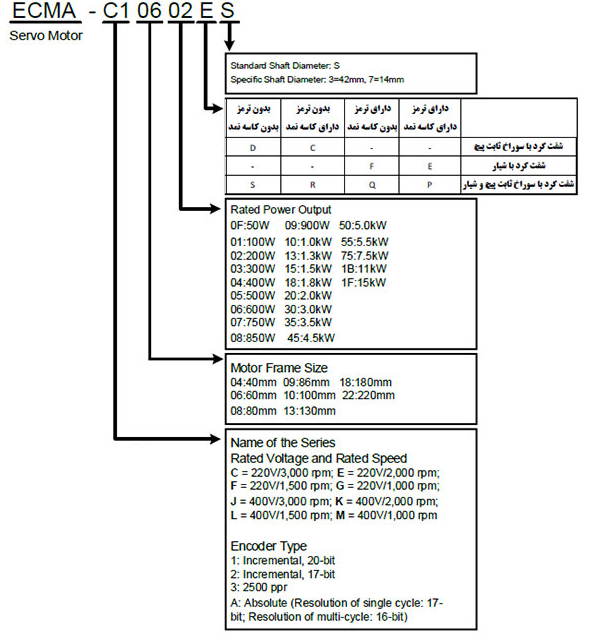
شکل 2: معرفی سروو موتور دلتا A2
برای شروع به کار کردن یک سروو AC باید به موارد زیر عمل کنید :

قسمت 1: قسمتهای تغذیه درایو و موتور شرکت دلتا مطابق با استاندارد آن شرکت اجرا شوند.
۱. تغذیه ورودی درایو (سه فاز یا تکفاز) را متصل کنید.
٢. کابل واسط قدرت مابین موتور و درایو را متصل نمایید.
٣. بلوک ترمینال ۵ پین برای ترمینال های ( L1C , L2C , R , S , T)
۴. بلوک ترمینال 3 پین برای ترمینال های ( U , V , W )
۵. بلوک ترمینال ۴ پین برای ترمینال های ( P , D , C , – )
6.یک سیم برای جامپر کردن (نصب شده برای پینهای +P و D از بلوک ترمینال 3 پین برای P+ , D ,C )
قسمت 2 : قسمتهای انتخابی
- یک کابل قدرت، این کابل را به کانکتور قدرت موتور متصل نموده و سر دیگر آن را به ترمینال های U , V , W درایو مطابق رنگ سیم وصل کنید. این کابل دارای یک سیم ارت به رنگ زرد-سبز می باشد. حتما سیم ارت را به بدنه درایو محل اتصال سیم ارت متصل نمایید.
۲. یک کابل انکدر، این کابل را به کانکتور موتور متصل کنید و سر دیگر آن را به کانکتور CN2 درایو متصلکنید.
٣. کانکتور CN1، برای سیگنال های فرمان می باشد.
۴. کانکتور CN2، واسط انکدر می باشد.
۵. کانکتور CN3، جهت اتصال کامپیوتر و کی پد ارتباطات سریال شبکه می باشد.
مشخصات فنی موتور سروو دلتا A2
- رنج توان از 100w تا 15kw
- قابلیت اضافه شدن انکودر دوم برای گرفتن لقی گیربکس و لقی سایر تجهیزات مکانیکی
- دارای ورودی پالس ۴ MPPS متناسب با کنترلرهای CNC
- پورت داخلی CAN open/ RS-232 / RS485
- بهره مندی از ۶۴ حافظه داخلی جهت کنترل موقعیت داخلی
- دارای قابلیت کنترل ۲ مد به صورت هم زمان
- دارای مد های گشتاور ، موقعیت و سرعت و کنترل مد گشتاور و سرعت با پارامترهای داخلی یا ولتاژ ورودی
- دارای ورودی 220vو 380v
- قابلیت Full-close loop شدن با استفاده از انکودر دوم جهت دفع لقی مکانیکی قابل تنظیم تا ۷۲۰ نقطه E-CAM
- قابلیت پیکر بندی نرم افزاری توسط نرم افزار ASD-SOFT
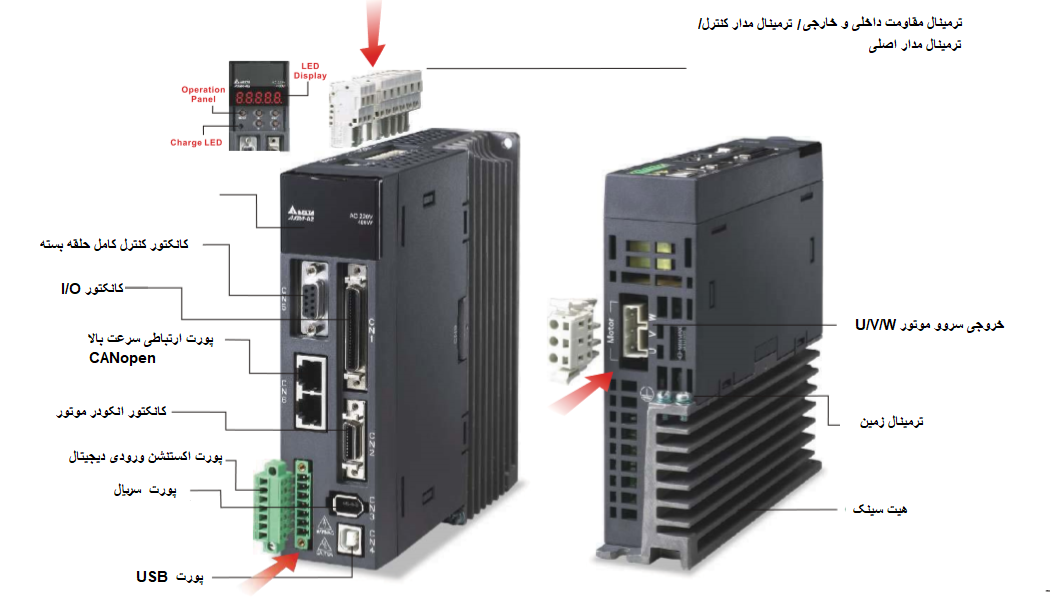
اجزا سازنده درایو سرو دلتا A2
- Charge LED
این چراغ نمایشگر نشان میدهد که ولتاژ قدرت ورودی به درایو وصل شده است. با قطع ولتاژ ورودی، این نمایشگر برای چند ثانیه روشن می ماند. دقت کنید که در این وضعیت نباید به ترمینال های قدرت دست بزنید، چون در این حالت برق گرفتگی شدیدی برای شما اتفاق می افتد.
- LED Display
یک 7segبا نمایشگر ۵ رقمی می باشد که وضعیتها یا کدهای خطای درایو را نمایش میدهد.
- Operator Panel
کدهای تابع می باشند که می توان با آنها تنظیمات پارامترها و توابع را انجام داد و همچنین عیب یابی، مانیتورینگ وضعیت های درایو را مشاهده کرد.
MODE: با فشردن این دکمه می توان مد درایو را تغییر داد و انتخاب کرد.
SHIFT: این دکمه چند کاره می باشد: حرکت دادن مکان نما به سمت چپ و وارد شدن به هریک از گروه پارامترها با فشردن این دکمه امکان پذیر است.
UP: با فشردن این دکمه میتوان مقدار نمایش داده شده بر روی نمایشگر را افزایش داد.
DOWN: با فشردن این دکمه می توان مقدار نمایش داده شده بر روی نمایشگر را کاهش داد.
SET: با فشردن این دکمه میتوان مقدار تغییرات داده توسط کاربر را ذخیره کرد.
- (Control circuit terminal (L1C , L2C
ترمینال منبع تغذیه مدار کنترلی، ترمینال های مدار قدرت ورودی، باید به این ترمینال ولتاژ تغذیه 230-220 VAC با فرکانس HZ 50/60 اعمال شود .
- (Main Circuit Terminal ( R , S , T
ترمینال های مدار قدرت ورودی، باید به این ترمینال ولتاژ تغذیه VAC
220 -230 با فرکانس50/60 HZ اعمال شود.
- (Servo Motor Output (U, V , W
بلوک ترمینال 3 پین برای ترمینال های ( U , V , W ) .ترمینال های قدرت خروجی که برای اتصال به موتور استفاده می شود. هرگز برق ورودی را به ترمینال های خروجی وصل نکنید. در این صورت ممکن است به درایو آسیب برسد. اگر کابل خروجی قدرت موتور به درستی به درایو متصل نشود (یعنی سیمهای U, V , Wدرایو) به مدار قدرت خروجی درایو آسیب می رسد.
- Internal/External Regenerative Resistor Terminal (ترمینال اتصال مقاومت احیا کننده و یا واحد ترمز P + , D , C)
مقاومت Regenerative داخلی: از اتصال کوتاه بودن مدار بین ترمینال های P , D و مدار باز بودن ترمینال های P,C مطمئن شوید.
مقاومت Regenerative خارجی: مقاومت Regenerative را به ترمینال های P , C وصل کنید و از مدار باز بودن ترمینالهای P , Dمطمئن شوید.
مقاومت regenerative فقط به درایوهای با توان 750W و بالاتر متصل شود. مطمئن شوید که مدار بین ترمینال های P, D را وقتی که از مقاومت Regenerative داخلی استفاده می کنید، اتصال کوتاه باشند.
واحد ترمز خارجی: واحد ترمز خارجی به ترمینال های +P و – متصل می شود. از اتصال باز بودن بین ترمینال های D , P+ و C , P+ در هنگام استفاده از ترمز مطمئن شوید. وقتی که از مقاومت احیا کننده خارجی استفاده می کنید، مقاومت احیا کننده را به ترمینالهایP , C وصل کنید و اطمینان حاصل نمایید که مدار بین ترمینال های P ,D باز باشد.
وقتی که از مقاومت احیا کننده داخلی استفاده می کنید، اطمینان حاصل نمایید که مدار مابین ترمینال های P , D بسته (اتصال کوتاه) باشد و مدار مابین ترمینال های P, C باز باشد .بلوک ترمینال ۴ پین برای ترمینال های ( P , D , C , – ) . یک سیم برای جامپر کردن (نصب شده برای پین های +P و D از بلوک ترمینال 3 پین برای P+ , D ,C )
- Heatsink
در بی خطرترین قسمت درایو برای اتلاف حرارت ایجاد شده درایو بکار می رود.
- Ground Terminal
ترمینال اتصال به زمین (ارت)
- (کانکتور CN1 (I/O Interface
ترمینال ورودی /خروجی ، از این واسط برای اتصال کنترلرهای خارجی مانند پی ال سی دلتا یا کنترل سیگنال ورودی خروجی استفاده می شود.
- کانکتور (CN2 (Encoder Interface
از این کانکتور برای اتصال انکدر موتور به درایو استفاده می شود.
|
کانکتور 20 پین سمت CN2 |
کانکتور نظامی سمت موتور |
| 5 قرمز | A |
| 13,15 آبی | R |
| 14,16 سبز | S |
| 4 سفید | B |
| مشکی | L ارت |
جدول 1: اتصالات کانکتور سروو موتور دلتا A2
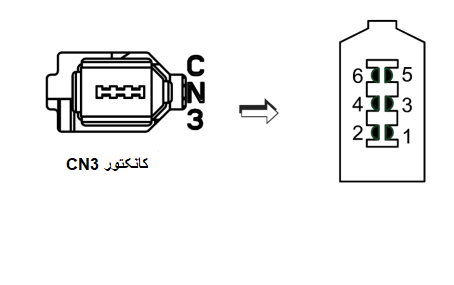
- (کانکتور CN3 (Serial Communication Interface
از این کانکتور برای اتصال ارتباط سریال 485 / 232 -RS و ارتباط به کامپیوتر شخصی یا دیگر کنترلرها استفاده می شود. کانکتور CN3، کانکتور جهت اتصال کامپیوتر و کی پد ارتباطات سریال شبکه می باشد.
- کانکتور CN4 :
پورت ارتباطی USB می باشد.
- کانکتور کنترل کامل حلقه بسته CN5 :
برای اتصال مقیاس خطی و انکودر برای کنترل سیگنال های فاز A , B , Z استفاده می شود.
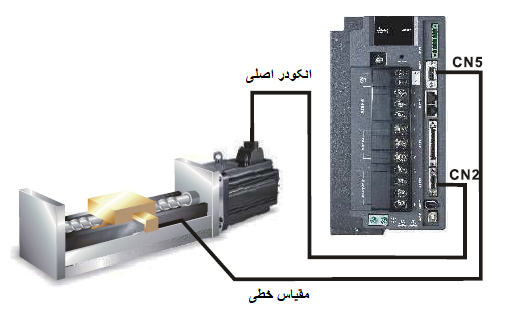
شکل 5: کانکتور کنترل کامل حلقه بسته CN5
- پورت ارتباطی سرعت بالا CN6:
- برای ارتباط از طریق CANopen
- یک پورت ورودی و یک پورت خروجی ارتباط سریال را فراهم می آورد .
- کانکتور CANbus ، پشتیبانی از مد های حرکتی برای اجرا CANopen DS402

شکل 6: پورت ارتباطی سرعت بالا
- پورت اکستنشن ورودی دیجیتال CN7
برای اتصال بلوک ترمینال ورودی دیجیتال قابل حذف استفاده می شود . حداکثر 6 ورودی دیجیتال می توان اضافه شود .
- ترمینال ارت (زمین)
سیم ارت موتور و همچنین سیم ارت تغذیه ورودی باید به این ترمینالها متصل شوند.
حوه سیم کشی ورودی های پالس با ولتاژ 24 ولت داخلی (VDD)
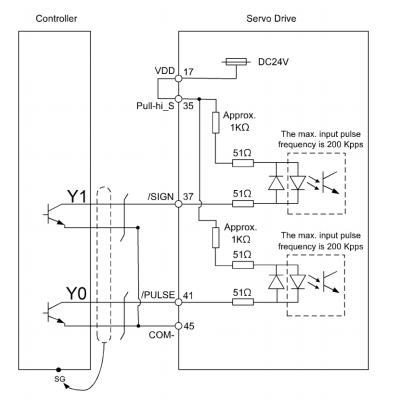 شکل 7: سیم کشی ورودی پالس با ولتاژ 24 ولت
شکل 7: سیم کشی ورودی پالس با ولتاژ 24 ولت
نحوه سیم کشی ورودی های پالس با ولتاژ 24 ولت خارجی
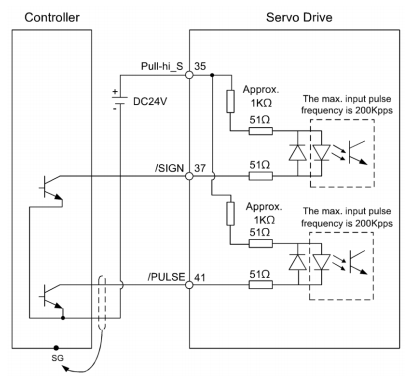
شکل 8: نحوه سیم کشی ورودی پالس با ولتاژ 24 ولت خارجی
سوکت CN3 برای اتصال RS232 و RS485 برای اتصال به PLC , HMI با پروتکل مودباس
| نماد ترمینال | نام سیگنال | شماره پین |
| GND | زمین | 1 |
| RS-232_TX | انتقال داده RS-232 | 2 |
| – | – | 3 |
| RS-232_RX | دریافت داده RS-232 | 4 |
| RS_485+ | انتقال داده RS-485 | 5 |
| RS-485- |
انتقال داده RS-485 |
6 |
جدول 2:اتصالات RS232 و RS485
مدهای کنترل درایو
عملکرد مدهای کنترلی در جدول زیر لیست شده است. اینورتر Delta برای پنج مد کنترل تکی و سه مد کنترل دوگانه برنامه ریزی شده است.
مد تکی
- کنترل موقعیت خارجی P : کنترل موقعیت برای موتور به وسیله یک منبع پالس خارجی فعال می نمود.
- کنترل سرعت S : کنترل سرعت برای موتور می تواند به وسیله پارامترها تنظیم شود و یا از یک منبع آنالوگ خارجی + 10 ولت تا – 10 ولت فعال شود. کنترل داخلی سرعت با تنظیم پارامتری و به وسیله ورودی های دیجیتال (DI)امکان پذیر است.
- کنترل داخلی سرعت SZ : کنترل سرعت دخلی برای موتور فقط به وسیله پارامترها امکان پذیر است. سرعت سرعت داخلی توسط پارامترها تنظیم شده و با ورودی های دیجیتال (DI)فعال می شوند.
- کنترل گشتاور T : کنترل گشتاور برای موتور می تواند به وسیله پارامترها تنظیم شده و یا از یک منبع آنالوگ خارجی +10 ولت تا – 10 ولت فعال شود. کنترل داخلی گشتاور با تنظیم پارامتری و به وسیله ورودی های دیجیتال(DI)امکان پذیر است.
- کنترل داخلی گشتاور TZ :کنترل داخلی گشتاور برای موتور فقط به وسیله پارامترها امکان پذیر است. گشتاور داخلی توسط پارامترها تنظیم شده و با ورودی های دیجیتال (DI)فعال می شوند
مد دوتایی
S-P: هر یک از مدهای کنترلی سرعت S یا موقعیت P می توانند به وسیله ورودی های دیجیتال انتخاب شوند.
T-P : هر یک از مدهای کنترلی گشتاور T یا موقعیت P می توانند به وسیله ورودی های دیجیتال انتخاب شوند.
S-T : هر یک از مدهای کنترلی سرعت S یا گشتاور T می توانند به وسیله ورودی های دیجیتال انتخاب شوند.
مد های کنترلی بالا را می توان به وسیله پارامتر 01-P1 انتخاب کرد. اگر مد کنترلی درایو را تغییر دادید، برای اعمال تغییرات باید یک بار برق تغذیه درایو را قطع کرده و مجددا وصل نمایید. مد کنترلی جدید فقط در صورت قطع برق و وصل مجدد برق تغذیه ورودی درایو فعال می شود و معتبر می باشد.
مراحل انتخاب مد کنترل سرو موتور دلتا A2
- درایو باید در وضعیت Servo Off (غیرفعال) باشد. درایو باید در وضعیت غیرفعال باشد.
- از پارامتر P1-01 استفاده کنید.
- بعد از اینکه تنظیمات کامل شد برق درایو را قطع کرده و مجددا برق تغذیه ای درایو را وصل کنید.
- مد کنترل موقعیت موتور سرو دلتا A2 چیست
مد کنترل موقعیت ( P Mode) معمولا برای کاربردهایی که نیاز به موقعیت دقیق دارد، از قبیل ماشین های CNC مورد استفاده قرار می گیرد. درایو سری ASDA – B2 دلتا یک نوع از منبع فرمان در مد کنترل موقعیت را پشتیبانی می کند. این منبع فرمان قطار پالس مستقیم می باشد که می توان با آن زاویه چرخش موتور را کنترل کرد.
در درایو سری ASDA – B حداکثر فرکانس ورودی برای پالس خارجی فرمان 500 Kpps (Line Drive ) یا 200 Kpps(کلکتور باز) می باشد و در درایو سری ASDA – B2 حداکثر فرکانس ورودی برای پالس خارجی رمان MppS 4 می باشد که این فرکانس ها برابر rpm 3000 سرعت چرخش موتور است.
برای close loop حلقه کنترل سرعت قسمت اصلی می باشد و پارامترهای ضریب تقویت حلقه موقعیت و ان feed forward قسمت کمکی حلقه موقعیت می باشند. کاربر می تواند دو نوع مد خود تنظیم tuning )مد های دستی / اتوماتیک) را برای میزان سازی ضریب تقویت انجام دهد.
منبع فرمان برای مد کنترل موقعیت (PT)
منبع فرمان مد کنترل موقعیت (P mode) یک ورودی قطار پالس خارجی ورودی درایو می باشد. سه نوع پالس ورودی را می توان به درایو اعمال کرد و هر یک از انواع پالس ها یک نوع منطق با (قطب مثبت، قطب منفی) دارند. به یک از پالس های ورودی را می توان توسط پارامتر 00-P1 انتخاب کرد.
پارامتر های مد کنترل موقعیت سروو درایو دلتا A2
| تابع | پارامتر |
| مد کنترل و خروجی مستقیم | P1-01 |
| سرعت و محدوده گشتاور | P1-02 |
| اولین الی سومین محدوده گشتاور | P1-12 _P1-14 |
| تعداد پالس خروجی انکدر | P1-46 |
| حداکثر محدوده سرعت | P1-55 |
| مد پاک کردن خطای پالس | P1-50 |
| فرمان کنترل پالس خارجی (P Mode) | |
| نوع پالس ورودی خارجی | P1-00 |
| نسبت گیربکس الکترونیکی
( صورت کسر ) N1 |
P1-44 |
| نسبت گیربکس الکترونیکی (مخرج) | P1-45 |
| نسبت گیربکس الکترونیکی
(دومین صورت کسر ) N2 |
P1-60 |
| نسبت گیربکس الکترونیکی
(سومین صورت کسر ) N3 |
P2-61 |
جدول 3:پارامتر های مد کنترل موقعیت
مد کنترل سرعت
مد کنترل سرعت Sz یا S می باشد و معمولا در کاربردهای کنترل سرعت دقیق استفاده می شود، مانند ماشین های CNC وغيره.درایو دلتا سری ASDA – B2 دو نوع منبع فرمان در مد کنترل سرعت را ساپورت می کنند. یکی سیگنال آنالوگ خارجی و دیگری توسط پارامتر داخلی می باشد. سیگنال آنالوگ خارجی یک ولتاژ ورودی خارجی می باشد و این ولتاژ می تواند سرعت موتور را کنترل کند. دو کاربرد برای پارامتر داخلی وجود دارد:
- سه نوع فرمان متفاوت تغییر سرعت موتور توسط پارامترهای کنترل سرعت وجود دارد که باید ازسوییچ کردن سیگنال های ورودی دیجیتال DI توسط کانکتور CN1 با نام ورودی ها SP0 و SP1 این سه سرعت را بدست آورد .
- برای تغییر مقدار تنظیمی پارامتر سرعت از ارتباطات سریال (شبکه)استفاده می شود.
از طرف دیگر سوئیچ کردن بسیار یکنواخت فرمان سرعت را باید بسازید، که درایو سری ASDA-B2 دلتا برای مد کنترل سرعت یک نمودار منحنی S کامل را ایجاد کرده است. برای کنترل سرعت حلقه بسته در درایو دلتا سری ASDA – B2 تابع میزان ساز ضریب تقویت و یک انتگرال گیر PI و کنترلر PDFF را فراهم کرده است .از طرف دیگر، تکنولوژی خود تنظیم tuning در دو مد (دستی / اتوماتیک) برای انتخاب توسط کاربر با پارامتر P2 – 32 اماده شده است.
دو مد خود تنظیم برای تنظیمات ضریب تقویت وجود دارد:
- مد دستی: تنظیمات ضریب تقویت حلقه در این مد به آسانی صورت می گیرد. وقتی که از این مد استفاده کنید، تمام توابع اتوماتیک و توابع کمکی غیر فعال می شوند.
- مد اتوماتیک: تنظیمات پیوسته مطابق با ضرایب تقویت حلقه برای اندازه گیری اینرسی، با ده سطح پهنای باند صورت می گیرد. تنظیم پارامتر توسط کاربر صورت می گیرد و در ابتدا تمام مقادیر، پیش فرض کارخانه می باشند.
منبع فرمان مد کنترل سرعت سرو موتور دلتا A2 چیست
- سیگنال آنالوگ خارجی: جنس ورودی سیگنال خارجی از نوع ولتاژ می باشد .+10 ولت تا -10 ولت
- پارامتر داخلی: P1-09 الی P1-11
- وضعیت سیگنال 1-SPD0: نمایشگر OFF (کانکتور در حالت عادی باز) و1: نمایشگر ON (کانکتور در حالت عادی بسته )می باشد.
- وقتی که SPD0 و SPD1 هر دو برابر (OFF)0 باشند، اگر مد کنترل Sz باشد، سرعت چرخش روتور موتور باید برابر 0 تنظیم شود. از این رو، اگر کاربر از ولتاژ آنالوگ به عنوان منبع فرمان سرعت استفاده نمی کند می تواند مد کنترل Sz را انتخاب کرده و از مشکل تغییر در خروجی مدار الکترونیکی نقطه صفر توسط آنالوگ از جنس ولتاژ دوری کند.
اگر مد کنترل سرعت S باشد، منبع فرمان سرعت ولتاژ آنالوگ ما بین ترمینال های V – REF و GND می باشد. تنظیم دامنه تغییرات ورودی ولتاژ از +10 ولت تا -10 ولت می باشد و سرعت موتور برابر با سرعت قابل تنظیم توسط پارامتر 40-P1 است.
- وقتی که کمتر از یک ورودی SPD0 و SPD1 برابر 0 OFF نباشد، منبع فرمان سرعت یکی از پارامتر های P1-09 تا P1-11خواهد بود. در صورتیکه هر یک از ورودی های SPD0 یا SPD1 تغییر کنند، یک منبع فرمان سرعت مطابق با وضعیت سیگنال ورودی های SPD0 و SPD1 تغییر خواهد کرد و معتبر (فعال) می باشد.
- دامنه تغییرات پارامترهای داخلی مابین r/min -5000تا +5000می باشد. مقدار تنظیمات = دامنه تغییرات × واحد ( r/ min1) برای مثال، اگر 09-P1 برابر با ۳۰۰۰۰+ تنظیم شود، مقدار تنظیمی برابر = (۳۰۰۰۰+) (0.1 r/min)=+3000r/minخواهد بود.
این فرمان سرعت توضیح داده شده فقط برای مدکنترل سرعت مدهای S یا Sz نمی باشد، بلکه برای محدود کردن سرعت ورودی در مد کنترل گشتاور مدهای T و Tz نیز مورد استفاده قرار می گیرد.
پارامتر های مد کنترل سرعت سروو درایو دلتا A2
| تابع | پارامتر |
| مد کنترل و خروجی مستقیم | P1-01 |
| سرعت و محدوده گشتاور | P1-02 |
| تعداد پالس خروجی انکدر | P1-46 |
| حداکثر محدوده سرعت | P1-55 |
| اولین الی سومین محدوده سرعت | P1-09 _P1-11 |
| اولین الی سومین منبع فرمان | |
| اولین الی سومین منبع فرمان گشتاور | P1-12_P1-14 |
| اولین الی سومین محدوده گشتاور | |
| حداکثر محدوده و منبع فرمان سرعت آنالوگ | P1-40 |
| حداکثر محدوده منبع فرمان سرعت آنالوگ | P1-41 |
| حداکثر سرعت چرخش در خروجی انکدر | P1-76 |
جدول 4:پارامترهای مد کنترل سرعت
مد کنترل گشتاور
مد کنترل ( T یا Tz) معمولا در یکی از کاربرد های گشتاور مانند ماشین چاپ ، ماشین ریسندگی ، ماشین جمع کن استغاده می شود . درایو دلتا سری ASDA – B2 دو نوع منبع فرمان در مد کنترل گشتاور را ساپورت می کنند.
یکی سیگنال آنالوگ خارجی و دیگری توسط پارامتر داخلی می باشد. سیگنال آنالوگ خارجی یک ولتاژ ورودی خارجی می باشد و این ولتاژ می تواند گشتاور موتور را کنترل کند. از پارامتر های P1-12 الی P1-14 برای کنترل گشتاور موتور توسط پارامتر داخلی استفاده می شود .
منبع فرمان مد کنترل گشتاور سروو دلتا A2
- سیگنال آنالوگ خارجی: جنس ورودی سیگنال خارجی از نوع ولتاژ می باشد .+10 ولت تا -10 ولت
- پارامتر داخلی : P1-12 الی P1-14
- وضعیت سیگنال 1- TCM0 :0 : نمایشگر OFF (کانکتور در حالت عادی باز) و1: نمایشگر ON (کانکتور در حالت عادی بسته )می باشد.
- وقتی کهTCM0 و TCM1 هر دو برابر (OFF)0 باشند، و عملکرد مد کنترل گشتاور Tz باشد ، فرمان برابر 0 است. اگر کاربر از سیگنال آنالوگ به عنوان منبع فرمان گشتاور استفاده نکند، می تواند مد کنترل Tzرا برای کنترل عملکرد گشتاور انتخاب کند.
مشکل انحراف نقطه صفر در مد کنترل گشتاور،(اگر کاربر می خواهد مقدار آفست ورودی گشتاور آنالوگ را تنظیم کند از پارامتر P4-23 استفاده کند ) در ولتاژ آنالوگ را تنظیم نماید.
عملکرد کنترل مد گشتاور T باشد، فرمان ورودی ولتاژ آنالوگ بین ترمینال های T-REF و GND بسته می شود. رنج تنظیم ورودی آنالوگ از -10 ولت تا +10 ولت و مطابق با گشتاور قابل تنظیم می باشد.
- وقتی که یکی از TCM0 و TCM1 و یا هر دو برابر 1 (On) باشند، منبع گشتاور پارامتر داخلی می باشد. یعنی اگر هر یک از TCM0 یا TCM1از 0(OFF) به 1 (On)تغییر وضعیت دهند، منبع گشتاور داخلی طریق پارامتر معتبر می باشد. این منبع گشتاور مطلوب فقط در مد کنترل گشتاور (Tz یا T) استفاده نمی شود. بلکه باید از منبع ورودی محدود کننده گشتاور در مد کنترل موقعیت ( P) و در مد کنترل سرعت ( S یا Sz ) استفاده شود.
پارامتر های مد کنترل گشتاور موتور سروو دلتا A2
| تابع | پارامتر |
| مد کنترل و خروجی مستقیم | P1-01 |
| سرعت و محدوده گشتاور | P1-02 |
| تعداد پالس خروجی انکدر | P1-46 |
| حداکثر محدوده سرعت | P1-55 |
| اولین الی سومین محدوده سرعت | P1-09 _P1-11 |
| اولین الی سومین منبع فرمان | |
| اولین الی سومین منبع فرمان گشتاور | P1-12_P1-14 |
| اولین الی سومین محدوده گشتاور | |
| حداکثر محدوده و منبع فرمان سرعت آنالوگ | P1-40 |
جدول 5:پارامترهای مد کنترل گشتاور
نمایندگی سروو درایو دلتا A2 در اصفهان
بارمان اتوماسیون سایا نمایندگی فروش سروو موتور اصفهان از جمله سرو موتور دلتا A2 در اصفهان و سراسر ایران می باشد. سرو دلتا A2 دارای دقت موقعیت یابی بالا و کنترل حلقه بسته کامل می باشد. هم چنین با داشتن پهنای باند تا حداکثر یک کیلو هرتز برای کاربردهای سرعت بالا و دقت بالا مناسب می باشد.
قیمت سروو موتور دلتا A2 در اصفهان
جهت اطلاع از قیمت موتور سروو دلتا a2 به قسمت تماس با ما رفته و با مشاوران فروش بارمان در ارتباط باشید. شرکت بارمان اتوماسیون سایا با داشتن تیم مهندسی و مشاوران فروش باتجربه پاسخگوی تمامی سوالات شما مشتریان عزیز از سراسر ایران می باشد.
خرید سرو درایو دلتا A2
سروو موتورهای سری A2 برای کاربردهایی که نیاز به پوزیشن داخلی (internal position) دارد و یا برای افزایش دقت از انکودر دوم استفاده می شود گزینه مناسبی هستند در کنار آن فروش سرو دلتا a2 بدلیل دارا بودن شبکه CANopen در بسیاری از ماشین آلات cnc استفاده می شود.
سرووهای دلتا سری A2 در رنج های مختلف توانی و در مدل های تکفاز و سه فاز را می توانید از بارمان اتوماسیون نمایندگی سروو موتور دلتا تهیه کنید.