آموزش راه اندازی سروو موتور دلتا b2






سرو B2
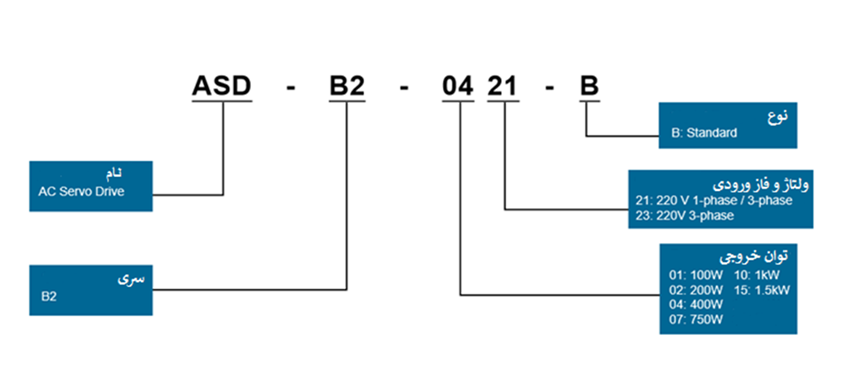
شکل 1:مشخصات سر
مشخصات سروو دلتا b

- دارای ورودی پالس 4 Mpps متناسب با کنترلرهایCNC
- دارای مدهای سرعت، موقعیت و گشتاور
- موجود در رنج های 0.1 Kw – 1.5 Kw
- ورودی ولتاژ 220 ولت – تکفاز و سه فاز
- دارای پورت RS-422 ،RS232 ،RS-458
- دقت کنترل سرعت گشتاور %1
- دارای نرم افزار بسیار آسان و کاربردی
- خروجی انکدر با ضریب قابل تنظیم
- دارای حفاظت مناسب و سیستم اعلام آلارم
- ورودر و خروجی دیجیتال و آنالوگ قابل تنظیم از طریق پارامترهای داخلی
- تکنولوژی تنظیم اتوماتیک
- پاسخ فرکانسی 1000 HZ
- رزولوشن انکودر 160000 پالس به ازای هر دور موتورسروو
کیبورد سروو دلتا
در ادامه تمامی کلیدهای موجود در صفحه کلید سروو موتور دلتا را مشاهده می کنید و کاربرد هریک شرح داده شده است.

شکل 2:نمایی از سروو موتور دلتا
Charge LED
این چراغ نمایشگر نشان میدهد که ولتاژ قدرت ورودی به درایو وصل شده است. با قطع ولتاژ ورودی، این نمایشگر برای چند ثانیه روشن می ماند. دقت کنید که در این وضعیت نباید به ترمینال های قدرت دست بزنید، چون در این حالت برق گرفتگی شدیدی برای شما اتفاق می افتد.
LED Display
یک 7seg با نمایشگر ۵ رقمی می باشد که وضعیتها یا کدهای خطای درایو را نمایش می دهد.
Operator Panel
کدهای تابع کیبورد سروو موتور دلتا می باشند؛ که می توان با آنها تنظیمات پارامترها و توابع را انجام داد و همچنین عیب یابی، مانیتورینگ وضعیت های درایو را مشاهده کرد.
MODE: با فشردن این دکمه می توان مد درایو را تغییر داد و انتخاب کرد.
SHIFT: این دکمه چند کاره می باشد: حرکت دادن مکان نما به سمت چپ و وارد شدن به هریک از گروه پارامترها با فشردن این دکمه امکان پذیر است.
UP: با فشردن این دکمه میتوان مقدار نمایش داده شده بر روی نمایشگر را افزایش داد.
DOWN: با فشردن این دکمه می توان مقدار نمایش داده شده بر روی نمایشگر را کاهش داد.
SET: با فشردن این دکمه میتوان مقدار تغییرات داده توسط کاربر را ذخیره کرد.
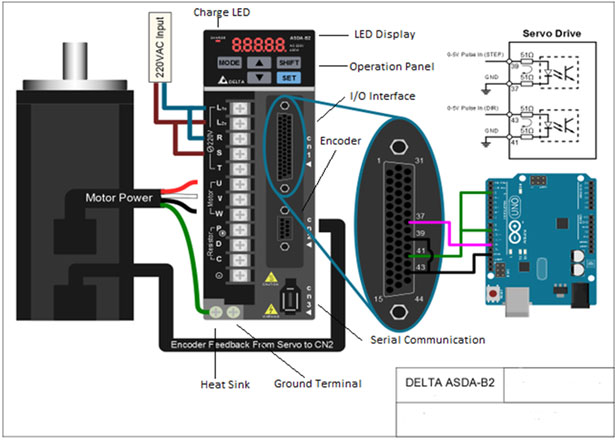
شکل 3: ترمینال های سروو موتور دلتا
(Control circuit terminal (L1C , L2C
ترمینال منبع تغذیه مدار کنترلی، ترمینال های مدار قدرت ورودی، باید به این ترمینال ولتاژ تغذیه 230-220 VAC با فرکانس HZ 50/60 اعمال شود.
(Main Circuit Terminal ( R , S , T
ترمینال های مدار قدرت ورودی، باید به این ترمینال ولتاژ تغذیه VAC220 -230 با فرکانس50/60 HZ اعمال شود.
(Servo Motor Output (U, V , W
بلوک ترمینال 3 پین برای ترمینال های ( U , V , W ) ترمینال های قدرت خروجی که برای اتصال به موتور استفاده می شود. هرگز برق ورودی را به ترمینال های خروجی وصل نکنید.
در این صورت ممکن است به درایو آسیب برسد. اگر کابل خروجی قدرت موتور به درستی به درایو متصل نشود (یعنی سیمهای U,V ,W درایو) به مدار قدرت خروجی درایو آسیب می رسد.
Internal/External Regenerative Resistor Terminal (ترمینال اتصال مقاومت احیا کننده و یا واحد ترمز P + , D , C)
مقاومت Regenerative داخلی: از اتصال کوتاه بودن مدار بین ترمینال های P ,D و مدار باز بودن ترمینال های P,C مطمئن شوید.
مقاومت Regenerative خارجی: مقاومت Regenerative را به ترمینال های P ,C وصل کنید و از مدار باز بودن ترمینالهای P ,Dمطمئن شوید.
مقاومت regenerative فقط به درایوهای با توان 750W و بالاتر متصل شود. مطمئن شوید که مدار بین ترمینال های P, D را وقتی که از مقاومت Regenerative داخلی استفاده می کنید، اتصال کوتاه باشند.
واحد ترمز خارجی: واحد ترمز خارجی به ترمینال های +P و – متصل می شود. از اتصال باز بودن بین ترمینال های D , P+ و C , P+ در هنگام استفاده از ترمز مطمئن شوید. وقتی که از مقاومت احیا کننده خارجی استفاده می کنید، مقاومت احیا کننده را به ترمینالهای P , C وصل کنید و اطمینان حاصل نمایید که مدار بین ترمینال های P ,D باز باشد.
وقتی که از مقاومت احیا کننده داخلی استفاده می کنید، اطمینان حاصل نمایید که مدار مابین ترمینال های P ,D بسته (اتصال کوتاه) باشد و مدار مابین ترمینال های P, C باز باشد. بلوک ترمینال ۴ پین برای ترمینال های ( P ,D ,C, – )، یک سیم برای جامپر کردن (نصب شده برای پین های +P و D از بلوک ترمینال 3 پین برای P+ ,D ,C )
Heatsink
در بی خطرترین قسمت درایو برای اتلاف حرارت ایجاد شده درایو بکار می رود.
Ground Terminal
ترمینال اتصال به زمین (ارت)
- کانکتور (CN1 (I/O Interface
ترمینال ورودی /خروجی، از این واسط برای اتصال کنترلرهای خارجی مانند PLC یا کنترل سیگنال ورودی خروجی استفاده می شود. کانکتور CN1، کانکتور ۴۴ پین برای سیگنال های فرمان می باشد.
- کانکتور (CN2 (Encoder Interface
از این کانکتور برای اتصال انکدر موتور به درایو استفاده می شود. کانکتور CN2، کانکتور 9 پین سریال واسط انکدر می باشد. (9D-sub )
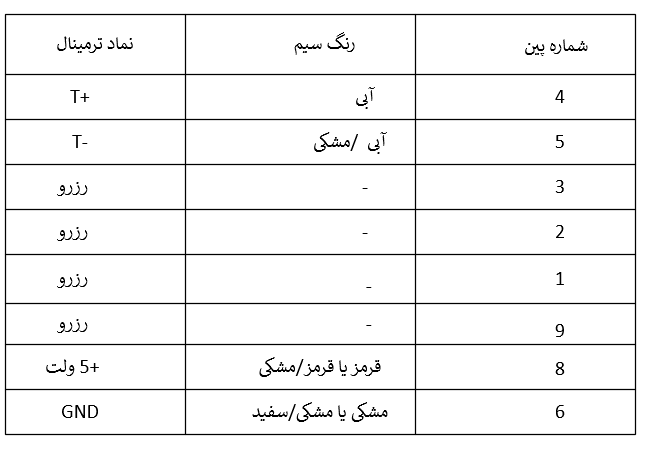
جدول 1: اتصالات کانکتور CN2
کانکتور (CN3 (Serial Communication Interface
از این کانکتور برای اتصال ارتباط سریال 485 / 232 -RS و ارتباط به کامپیوتر شخصی یا دیگر کنترلرها استفاده می شود. کانکتور CN3، کانکتور ۶ پین جهت اتصال کامپیوتر و کی پد ارتباطات سریال شبکه می باشد. (CN3 port – female)
کانکتور رزرو CN4 :
رزرو شده است.
ترمینال خروجی ولتاژ آنالوگ CN5 :
برای مانیتور کردن وضعیت های عملکرد سرو سیستم استفاده می شود. در این درایو دو کانال با نام های MON1 برای داده های خروجی با ولتاژ آنالوگ اماده شده است. مرجع این ولتاژهای خروجی زمین تغذیه کنترلی می باشد.
ترمینال ارت (زمین)
سیم ارت موتور و همچنین سیم ارت تغذیه ورودی باید به این ترمینالها متصل شوند.
توجه:
- فقط در درایوهای 750W و بالاتر در صورت نیاز باید مقاومت احیا کننده نصب شود. از مقاومت احیا کننده دردرایوهای کمتر از 400W استفاده نمی شود.
- نمایشگر CMD: این نمایشگر در مواقعی که درایو ON باشد، یا سرعت موتور برابر یا بالاتر از مقدار تنظیم شده (ZSPD) باشد، روشن می شود.
کاربرد سرو درایو B2 دلتا
این سروو موتور در صنایع مختلفی از جمله موارد زیر کاربرد دارد:
- ماشین های حمل و نقل
- دستگاه برش
- دستگاه های CNC فلزات،چوب،طلا
- ماشین آلات نساجی
- ماشین آلات چاپ
- دستگاه های تزریق پلاستیک
- دستگاه های پزشکی
- ماشین آلات و دستگاه های تولید قطعات الکترونیکی
- و…
مدهای کنترل سروو B2 دلتا
درایو دلتا برای پنج مد کنترل تکی و سه مد کنترل دوگانه برنامه ریزی شده است. عملکرد مدهای کنترلی در جدول زیر لیست شده است.
مدهای تکی موتور سرو دلتا b2:
- کنترل موقعیت خارجی P: کنترل موقعیت برای موتور به وسیله یک منبع پالس خارجی فعال می نمود.
- کنترل سرعت S: کنترل سرعت برای موتور می تواند به وسیله پارامترها تنظیم شود و یا از یک منبع آنالوگ خارجی + 10 ولت تا – 10 ولت فعال شود. کنترل داخلی سرعت با تنظیم پارامتری و به وسیله ورودی های دیجیتال (DI)امکان پذیر است.
- کنترل داخلی سرعت SZ : کنترل سرعت دخلی برای موتور فقط به وسیله پارامترها امکان پذیر است. سرعت سرعت داخلی توسط پارامترها تنظیم شده و با ورودی های دیجیتال (DI) فعال می شوند.
- کنترل گشتاور T: کنترل گشتاور برای موتور می تواند به وسیله پارامترها تنظیم شده و یا از یک منبع آنالوگ خارجی +10 ولت تا – 10 ولت فعال شود. کنترل داخلی گشتاور با تنظیم پارامتری و به وسیله ورودی های دیجیتال (DI) امکان پذیر است.
- کنترل داخلی گشتاور TZ: کنترل داخلی گشتاور برای موتور فقط به وسیله پارامترها امکان پذیر است. گشتاور داخلی توسط پارامترها تنظیم شده و با ورودی های دیجیتال (DI) فعال می شوند
مدهای دوتایی موتور سرو دلتا b2:
S-P: هر یک از مدهای کنترلی سرعت S یا موقعیت P می توانند به وسیله ورودی های دیجیتال انتخاب شوند.
T-P: هر یک از مدهای کنترلی گشتاور T یا موقعیت P می توانند به وسیله ورودی های دیجیتال انتخاب شوند.
S-T: هر یک از مدهای کنترلی سرعت S یا گشتاور T می توانند به وسیله ورودی های دیجیتال انتخاب شوند.

مد های کنترلی بالا را می توان به وسیله پارامتر 01-P1 انتخاب کرد. اگر مد کنترلی درایو را تغییر دادید، برای اعمال تغییرات باید یک بار برق تغذیه درایو را قطع کرده و مجددا وصل نمایید. مد کنترلی جدید فقط در صورت قطع برق و وصل مجدد برق تغذیه ورودی درایو فعال می شود و معتبر می باشد.
مراحل انتخاب مد کنترل:
- درایو باید در وضعیت Servo Off (غیرفعال) باشد. درایو باید در وضعیت غیرفعال باشد.
- از پارامتر P1-01 استفاده کنید.
- بعد از اینکه تنظیمات کامل شد برق درایو را قطع کرده و مجددا برق تغذیه ای درایو را وصل کنید.
- مد کنترل موقعیت
مد کنترل موقعیت ( P Mode) معمولا برای کاربردهایی که نیاز به موقعیت دقیق دارد، از قبیل ماشین های CNC مورد استفاده قرار می گیرد. سروو موتور دلتا سری B2 یک نوع از منبع فرمان در مد کنترل موقعیت را پشتیبانی می کند.
این منبع فرمان قطار پالس مستقیم می باشد که می توان با آن زاویه چرخش موتور را کنترل کرد. در درایو سری ASDA – B حداکثر فرکانس ورودی برای پالس خارجی فرمان 500 Kpps (Line Drive ) یا 200 Kpps(کلکتور باز) می باشد و در درایو سری ASDA – B2 حداکثر فرکانس ورودی برای پالس خارجی رمان MppS 4 می باشد که این فرکانس ها برابر rpm 3000 سرعت چرخش موتور است.
برای close loop حلقه کنترل سرعت قسمت اصلی می باشد و پارامترهای ضریب تقویت حلقه موقعیت و آن feed forward قسمت کمکی حلقه موقعیت می باشند. کاربر می تواند دو نوع مد خود تنظیم tuning (مد های دستی / اتوماتیک) را برای میزان سازی ضریب تقویت انجام دهد.
منبع فرمان برای مد کنترل موقعیت (PT)
منبع فرمان مد کنترل موقعیت (P mode) یک ورودی قطار پالس خارجی ورودی درایو می باشد. سه نوع پالس ورودی را می توان به درایو اعمال کرد و هر یک از انواع پالس ها یک نوع منطق با (قطب مثبت، قطب منفی) دارند. به یک از پالس های ورودی را می توان توسط پارامتر 00-P1 انتخاب کرد.
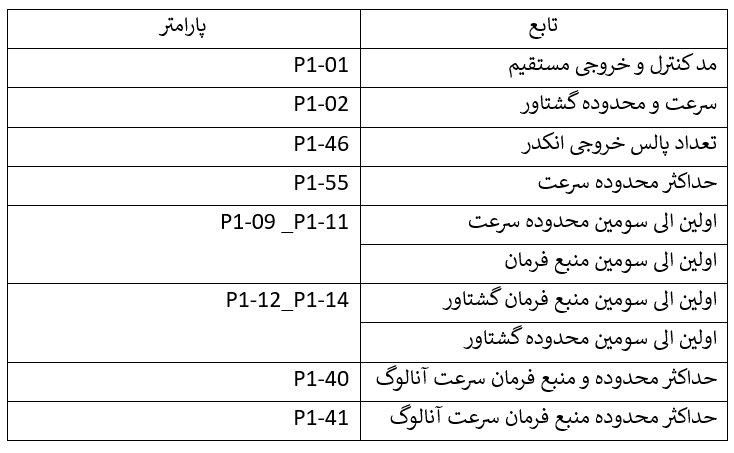
پارامتر های مد کنترل موقعیت:
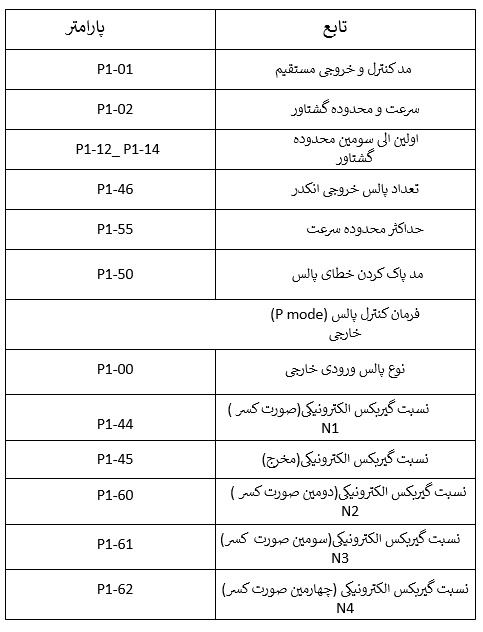
جدول 2: پارامترهای مد کنترل موقعیت
مد کنترل سرعت
مد کنترل سرعت Sz یا S می باشد و معمولا در کاربردهای کنترل سرعت دقیق استفاده می شود، مانند ماشین های CNC و غيره. سروو موتور سری ASDA – B2 دو نوع منبع فرمان در مد کنترل سرعت را ساپورت می کنند.
یکی سیگنال آنالوگ خارجی و دیگری توسط پارامتر داخلی می باشد. سیگنال آنالوگ خارجی یک ولتاژ ورودی خارجی می باشد و این ولتاژ می تواند سرعت موتور را کنترل کند. دو کاربرد برای پارامتر داخلی وجود دارد:
- سه نوع فرمان متفاوت تغییر سرعت موتور توسط پارامترهای کنترل سرعت وجود دارد که باید از سوییچ کردن سیگنال های ورودی دیجیتال DI توسط کانکتور CN1 با نام ورودی ها SP0 و SP1 این سه سرعت را بدست آورد.
- برای تغییر مقدار تنظیمی پارامتر سرعت از ارتباطات سریال (شبکه)استفاده می شود.
از طرف دیگر سوئیچ کردن بسیار یکنواخت فرمان سرعت را باید بسازید، که درایو سری ASDA-B2 دلتا برای مد کنترل سرعت یک نمودار منحنی S کامل را ایجاد کرده است.
برای کنترل سرعت حلقه بسته در درایو دلتا سری ASDA – B2 تابع میزان ساز ضریب تقویت و یک انتگرال گیر PI و کنترلر PDFF را فراهم کرده است. از طرف دیگر، تکنولوژی خود تنظیم tuning در دو مد (دستی / اتوماتیک) برای انتخاب توسط کاربر با پارامتر P2 – 32 آماده شده است.
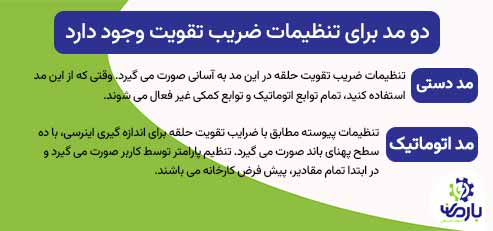
دو مد برای تنظیمات ضریب تقویت وجود دارد:
- مد دستی: تنظیمات ضریب تقویت حلقه در این مد به آسانی صورت می گیرد. وقتی که از این مد استفاده کنید، تمام توابع اتوماتیک و توابع کمکی غیر فعال می شوند.
- مد اتوماتیک: تنظیمات پیوسته مطابق با ضرایب تقویت حلقه برای اندازه گیری اینرسی، با ده سطح پهنای باند صورت می گیرد. تنظیم پارامتر توسط کاربر صورت می گیرد و در ابتدا تمام مقادیر، پیش فرض کارخانه می باشند.
منبع فرمان مد کنترل سرعت:
- سیگنال آنالوگ خارجی: جنس ورودی سیگنال خارجی از نوع ولتاژ می باشد. +10 ولت تا -10 ولت
- پارامتر داخلی: P1-09 الی P1-11
- وضعیت سیگنال 1-SPD0: نمایشگر OFF (کانکتور در حالت عادی باز) و نمایشگر ON (کانکتور درحالت عادی بسته )می باشد.
- وقتی که SPD0 و SPD1 هر دو برابر (OFF) 0 باشند، اگر مد کنترل Sz باشد، سرعت چرخش روتور موتور باید برابر 0 تنظیم شود. از این رو، اگر کاربر از ولتاژ آنالوگ به عنوان منبع فرمان سرعت استفاده نمی کند می تواند مد کنترل Sz را انتخاب کرده و از مشکل تغییر در خروجی مدار الکترونیکی نقطه صفر توسط آنالوگ از جنس ولتاژ دوری کند.
اگر مد کنترل سرعت S باشد، منبع فرمان سرعت ولتاژ آنالوگ ما بین ترمینال های V – REF و GND می باشد. تنظیم دامنه تغییرات ورودی ولتاژ از +10 ولت تا -10 ولت می باشد و سرعت موتور برابر با سرعت قابل تنظیم توسط پارامتر P1-40 است.
- وقتی که کمتر از یک ورودی SPD0 و SPD1 برابر 0 OFF نباشد، منبع فرمان سرعت یکی از پارامتر های P1-09 تا P1-11 خواهد بود. در صورتیکه هر یک از ورودی های SPD0 یا SPD1 تغییر کنند، یک منبع فرمان سرعت مطابق با وضعیت سیگنال ورودی های SPD0 و SPD1 تغییر خواهد کرد و معتبر (فعال) می باشد.
- دامنه تغییرات پارامترهای داخلی مابین r/min -5000 تا +5000 می باشد. مقدار تنظیمات = دامنه تغییرات × واحد (r/ min1) برای مثال:
اگر P1-09 برابر با ۳۰۰۰۰+ تنظیم شود، مقدار نهایی تنظیمی برابر حاصل زیر خواهد بود:
(+۳۰۰۰۰) (0.1 r/min) = +3000r/min
این فرمان سرعت توضیح داده شده فقط برای مدکنترل سرعت مدهای S یا Sz نمی باشد، بلکه برای محدود کردن سرعت ورودی در مد کنترل گشتاور مدهای T و Tz نیز مورد استفاده قرار می گیرد.
پارامتر های مد کنترل سرعت:
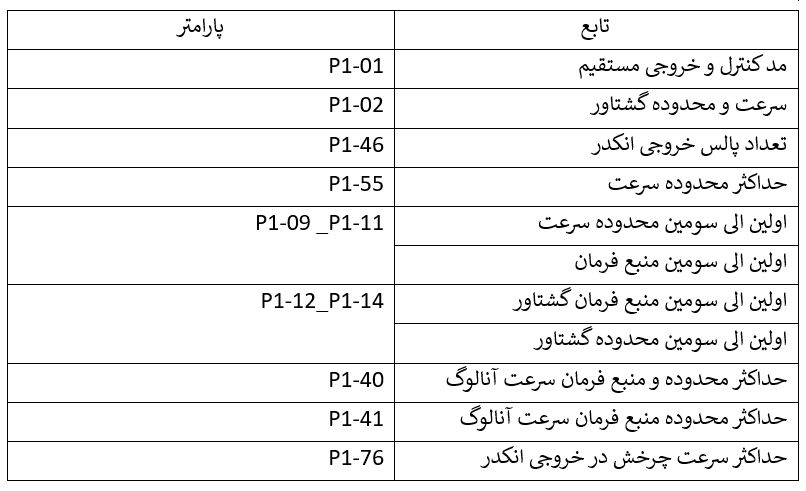
جدول 3:پارامترهای مد کنترل سرعت
مد کنترل گشتاور
مد کنترل ( T یا Tz) معمولا در یکی از کاربرد های گشتاور مانند ماشین چاپ، ماشین ریسندگی، ماشین جمع کن استغاده می شود. درایو دلتا سری ASDA – B2 دو نوع منبع فرمان در مد کنترل گشتاور را ساپورت می کنند. یکی سیگنال آنالوگ خارجی و دیگری توسط پارامتر داخلی می باشد.
سیگنال آنالوگ خارجی یک ولتاژ ورودی خارجی می باشد و این ولتاژ می تواند گشتاور موتور را کنترل کند. از پارامتر های P1-12 الی P1-14 برای کنترل گشتاور موتور توسط پارامتر داخلی استفاده می شود.
منبع فرمان مد کنترل گشتاور
- سیگنال آنالوگ خارجی: جنس ورودی سیگنال خارجی از نوع ولتاژ می باشد. +10 ولت تا -10 ولت
- پارامتر داخلی: P1-12 الی P1-14
- وضعیت سیگنال :TCM0 :0-1 نمایشگر OFF (کانکتور در حالت عادی باز) و 1: نمایشگر ON (کانکتور در حالت عادی بسته) می باشد.
- وقتی که TCM0 و TCM1 هر دو برابر (OFF) 0 باشند و عملکرد مد کنترل گشتاور Tz باشد، فرمان برابر 0 است. اگر کاربر از سیگنال آنالوگ به عنوان منبع فرمان گشتاور استفاده نکند؛ می تواند مد کنترل Tzرا برای کنترل عملکرد گشتاور انتخاب کند و مشکل انحراف نقطه صفر در مد کنترل گشتاور، (اگر کاربر می خواهد مقدار آفست ورودی گشتاور آنالوگ را تنظیم کند از پارامتر P4-23 استفاده کند) در ولتاژ آنالوگ را تنظیم نماید.
عملکرد کنترل مد گشتاور T باشد، فرمان ورودی ولتاژ آنالوگ بین ترمینال های T-REF و GND بسته می شود. رنج تنظیم ورودی آنالوگ از -10 ولت تا +10 ولت و مطابق با گشتاور قابل تنظیم می باشد.
- وقتی که یکی از TCM0 و TCM1 و یا هر دو برابر 1 (On) باشند، منبع گشتاور پارامتر داخلی می باشد. یعنی اگر هر یک از TCM0 یا TCM1 از 0 (OFF) به 1 (On) تغییر وضعیت دهند، منبع گشتاور داخلی طریق پارامتر معتبر می باشد.
این منبع گشتاور مطلوب فقط در مد کنترل گشتاور (TzیاT) استفاده نمی شود. بلکه باید از منبع ورودی محدود کننده گشتاور در مد کنترل موقعیت (P) و در مد کنترل سرعت (SیاSz) استفاده شود.
پارامتر های مد کنترل گشتاور سروو B2
جدول 4:پارامترهای مد کنترل گشتاور
آموزش راه اندازی سروو موتور دلتا b2
- کابل ارتباط بین درایو و موتور را از قسمت کانکتورها با خمیدگی و بصورت کج به همدیگر اتصال نمی دهیم.
- وقتی که درایو را در محل مونتاژ نصب می کنیم، از محکم بودن پیچها و اتصالات درایو به سطح کار و محکم بودن درایو در جایش مطمئن می شویم.
- اگر شفت موتور در حال چرخش با بار به صورت مستقیم جفت (درگیر شده است، مطمئن می شویم که مشخصات کوپلینگ موتور با مشخصات کوپلینگ بار یکی و برابر باشد و همچنین، این دو باید با یکدیگر در یک محور تراز باشند. در غیر این صورت، ممکن است به بار آسیب برسد و سرو خطا دهد و یا خطای بی موقع و زودرس کنترلی در سرو رخ دهد.
- اگر طول کابل واسط مابين درایو و موتور بیشتر از ۲۰ متر باشد، باید قطر سیم کابل انکدر و کابل قدرت موتور (اتصال به ترمینال های U, V , W ) را افزایش دهیم.
- مطمئن می شویم که پیچهای اتصال موتور به سطح کار سفت و محکم باشند.
- درایو را در محل تمیز و خشک نگهداری کنیم و نباید آن را زیر تابش مستقیم نور خورشید نصب نماییم. محدوده ی دمای محیطی که درایو در آنجا نگهداری می شود باید بین +65 درجه سانتیگراد و -25 درجه سانتیگراد باشد.
- درایو در محلی که رطوبت نسبی بین %90 – %0 دارد و همچنین جایی که بخار وجود نداشته باشد نصب و نگهداری کنیم.
- درایو را در معرض مواد خورنده، گازها و مایعات نگهداری و نصب نمی کنیم.
- پکیچ موتور و درایو را در محل سفت و صاف نگهداری کرده و نصب می کنیم.
آموزش پیکربندی سروو دلتا
اتصال درایو به وسایل جانبی و اولیه در شکل زیر، اتصالات مربوط به وسایل جانبی خارجی را که به درایو متصل شده است، مشاهده می کنیم.
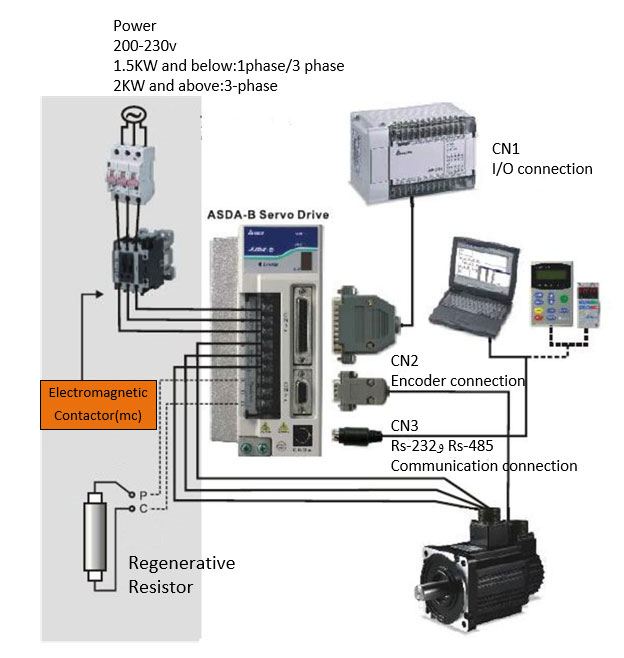
شکل 4: اتصال سروو موتور دلتا به وسایل جانبی و اولیه
آموزش سیم بندی سرو موتور دلتا B2
تنظیمات سروو درایو دلتا b2 را رعایت می کنیم و هیچ یک از اتصالات الکتریکی درایو و موتور را لمس نمی کنیم.
١. مطمئن می شویم که سیم بندی ترمینالهای ( R , S , T) منبع تغذیه اصلی درایو و همچنین، ترمینال های (L1 , L2c) منبع تغذیه کنترلی و ترمینال های ( U , V , W) موتور به درستی به ترمینال ها متصل شده باشند.
٢. از کابلهای دو زوج به هم تابیده شده شیلددار برای سیم بندی و کوپل کردن برق و همچنین حذف نویزهای الکتریکی و حذف تداخل امواج استفاده می کنیم.
٣. ولتاژ پرخطر ممکن است در داخل درایو تا مدتی باقی بماند، منتظر می مانیم تا چراغ LED شارژ خاموش شود. حال می توانیم ترمینال ها را نظافت کنیم.
۴. کابل های متصل به ترمینال های R ,S ,T و ترمینال های U ,V ,W باید بصورت مجزا از کابل انکدر و یا دیگر کابل های سیگنال باشند. فاصله کابل های قدرت از کابل های فرمان و انکدر باید بیشتر از ۳۰ سانتی در نظر می گیریم.
۵. کابل انکدر مخصوص بوده و در طول های مختلف در نمایندگی موجود اگر به کابل بلندتر نیاز بود، از تکه کردن کابل انکدر خودداری نماییم.
6. کابل موتور باید مقاومت ولتاژی PTFE 600 ولت داشته باشد. بلندی کابل قدرت باید کمتر از ۳۰ متر باشد. اگر متراژ کابل را بیشتر کردید، باید قطر سیم را نیز افزایش دهید.
7. شیلد کابلهای دو زوج شیلددار باید به ترمینال ارت درایو متصل کنیم. دقت می کنیم که فقط باید در سمت درایو عمل شیلد انجام پذیرد. اگر دو سمت شیلد را به ارت اتصال دهیم، یک حلقه بسته جریان بوجود می آید که باعث اختلال و ایجاد نویز می شود. (کابل فرمان)
آموزش راه اندازی سروو موتور با درایو
برای درایوهای 1.5 کیلووات و پایین تر می توان از هریک از دو اتصال تک فاز یا سه فاز استفاده کنیم. برای درایوهای 2 کیلووات و بالاتر فقط باید از اتصال سه فاز استفاده کنیم.
Power ON: کنتاکت a در حالت عادی باز می باشد.
Power OFF or Alarm Processing: کنتاکت b در حالت عادی بسته می باشد.
1 MC /x: بوبين الكترومغناطیسی کنتاکتور
1 MC/a: کنتاکت خود نگهدار مدار قدرت
1MC: کنتاکتهای قدرت در مسیر مدار قدرت
آموزش اتصال منبع تغذیه تک فاز به درایو
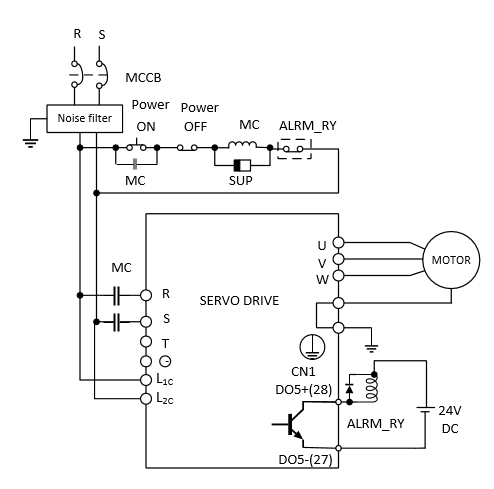
شکل 5:اتصال منبع تغذیه تک فاز به درایو
آموزش اتصال منبع تغذیه دلتا سه فاز به درایو
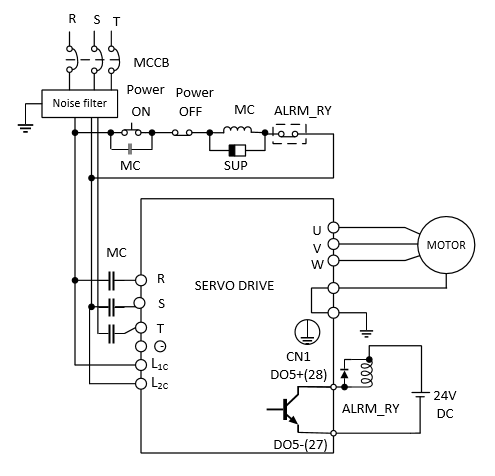
شکل 6: اتصال منبع تغذیه سه فاز به درایو
نمایش و کنترل توسط کی پد
چندین مد عملکرد توسط کی پد وجود دارد:
مدهای مانیتور Monitor، پارامتر Parameter، تنظیم پارامتر Parameter Setting، ذخیره Save، نوشتن در درایو Write و مد ویرایش سریع برنامه Fast Edit
در مد مانیتور، وضعیت های مانیتورینگ را مشاهد می نمائیم. در مد پارامتر، می توانیم نام پارامترها، واحد و مقدار تنظیمات و همچنین هر گروه از پارامترها را مشاهده کنیم. در مد تنظیم پارامتر، کاری می توانیم مقدار تنظیمات پارامترها را تغییر دهیم و ویرایش می نمائیم. در مد ذخیره، اجازه داریم پارامترهای قابل ذخیره سازی را از درایو به داخل کی پد یا کامپیوتر ذخیره می نمائیم.
در مد نوشتن، می توانیم پارامترهای خروجی از کی پد را به درایو بازگردانیم و در آن ذخیره نماییم. توجه می کنیم که وضعیت های توابع مانیتور کردن درایو غیر فعال است و نمایشگرهای LED روی کی پد درایو روشن هستند.
این وضعیت برای مواقعی که در مد ذخیره و نوشتن باشیم، غیر معتبر می باشد. در مد ویرایش سریع، می توانیم پارامترهای ضروری و اولیه راه اندازی را در دسترس داشته باشیم و تغییر دهیم.
نرم افزار ASDA- B2-Soft
“ASDA- B2-Soft” یک نرم افزار ویژه برای برنامه ریزی درایو می باشد که جهت برنامه ریزی و مانیتور کردن درایو در اختیار کاربران قرار دارد.
نرم افزار دارای توابع کامل بوده و هر یک شامل مانیتور کردن چند پارامتر مشخص بصورت همزمان و بدون کاهش سرعت مانیتورینگ توسط ’’Data Scope” اسیلوسکوپ دیجیتال می باشد Status Monitor” و “Alarm Information” گزینه های انتخابی می باشند،
از Digital I/O/ Jog Control برای مانیتور کردن بدون واسطه و کنترل همه سیگنال های ورودی و خروجی دیجیتال استفاده می شود، از Parameter Editor” نیز برای آپدیت کردن آنلاین پارامترها و از ’Auto Gain Tuning” برای کسب بیشترین مقدار ضریب تقویت مؤثر بهره گیری می شود. بنابراین، همه نوع تنظیمات مربوط به سرعت را می توانیم توسط این نرم افزار انجام دهیم.
هدف نرم افزار “ASDA- B2-Soft” اجازه دادن به ما برای استفاده از کاربردهای درایوهای شرکت دلتا در یک زمان کوتاه و راه اندازی سرو دلتا به راحتی می باشد. بنابراین، کار با این نرم افزار که واسط بین انسان و درایو می باشد و استفاده از توابع درایو ساده و آسان است.
دانلود کتاب راهنمای فارسی سروو موتور دلتا b2:
برای دسترسی راحت تر میتوانید کاتالوگ فارسی سروو موتور دلتا b2 را از فایل زیر دانلود نمائید. به علاوه اگر در مراحل نصب و راه اندازی سرو موتور دلتا با مشکلی مواجه شدید، می توانید با شماره های 03132244734 و 09029998190 با بخش فنی بارمان اتوماسیون تماس گرفته و مشاوره رایگان دریافت کنید.
آموزش راه اندازی سروو موتور دلتا pdf:






درود بر شما ممنون بابت اموزش عالی .ریست فکتوری درایو دلتا بی به چه صورت هستش؟
درود
پارامتر P2-08=10 تنظیم کرده و سپس درایو را یکبار خاموش و روشن کنید
سلام سروو موتور a2 دارم و سیم بندی رو طبق همین آموزش انجام دادم ولی حالت JOG کار نمیکنه اشکال از کجا میتونه باشه؟
اگر سیم بندی سروو موتور رو طبق آموزش انجام دادید اما موتور کار نمیکنه، ممکنه مشکل از چند عامل باشه:
1. مطمئن بشید که سیم بندی درست انجام شده باشد .
2.تنظیمات و پارامترهای سروو موتور را چک کنید.
3. کنترلردستگاه را چک کرده و از سالم بودن کنترلر و خروجی کنترلر اطمینان حاصل کنید
4. اگر همه مراحل بالا را بررسی کردین و مشکل همچنان ادامه دارد، ممکن است مشکل از داریو سروو باشد. در این صورت، نیاز به تعویض یا تعمیر داریو سروو هست .
اگر با انجام این مراحل همچنان مشکل را حل نکردین، میتونین با بخش فنی بارمان نماس بگیرید تا راهنمایی های لازم را به شما ارائه دهند. 09029998190