-
اينورتر سه فاز INVT GD20 توان 18.5KW30,480,000 تومان
-
GD200A-250G/280P-4306,800,000 تومان
-
سروو موتور 2 کیلووات دلتا 2000 دور A2 ترمزدار69,211,000 تومان
-
سروو موتور 2 کیلو وات 2000 دور A2 دلتا57,426,000 تومان
-
اینورتر 22 کیلووات دلتا C2000 سه فاز سری VFD220C43A54,556,000 تومان
-
اچ ام آی دلتا 4 اینچ سری DOP-103BQ5,443,000 تومان
-
GD200A-2R2G-49,420,000 تومان
-
GD200A-055G/075P-477,010,000 تومان
-
GD10-0R7G-4-B6,390,000 تومان
-
سروو موتور 3 کیلو وات 1500 دور A2 ترمزدار دلتا99,181,000 تومان
-
ماژول آنالوگ دلتا DVP04AD-S25,192,000 تومان
-
اچ ام آی دلتا 10 اینچی سری DOP-110IS15,552,000 تومان
-
GD20-022G-433,560,000 تومان
-
GD200A-018G/022P-430,900,000 تومان
-
GD20-1R5G-S26,620,000 تومان
-
ماژول آنالوگ دلتا سری AS04AD-A7,014,000 تومان
-
سروو موتور 1 کیلووات دلتا 2000 دور A231,260,000 تومان
-
GD20-015G-424,340,000 تومان
-
پی ال سی دلتا Delta PLC سری AS332T-A19,252,000 تومان
-
سروو موتور 1 کیلو وات دلتا 2000 دور B2 ترمزدار37,513,000 تومان
-
GD200A-045G/055P-466,590,000 تومان
-
GD20-030G-443,770,000 تومان













جمع كل سبد خريد: 1,104,070,000 تومان
هزینه حمل و نقل به عهده مشتری100






سلام وقت بخیر و خسته نباشید
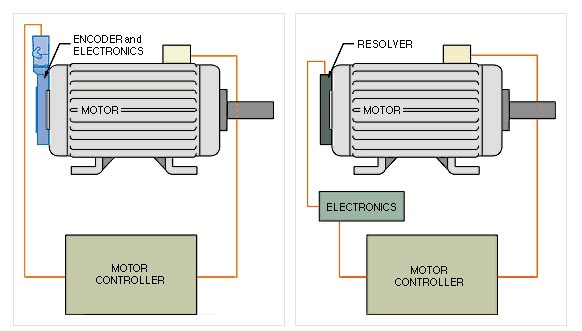
ریزالور دستگاهcnc تراش روسی قابل تعمیر هست آیا؟؟
ممنون میشم راهنمایی کنید