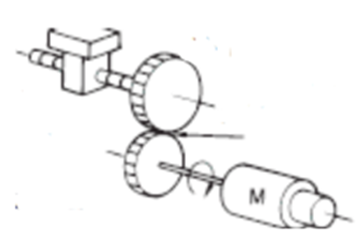
سروو موتور چگونه کار می کند

سروو موتورها با هدف جایگزینی با استپ موتورها برای فراهم کردن سرعت بالاتر و دقت بالاتر کنترل ارائه شده اند. در این مقاله 10 نکته مهم در انتخاب سروو موتور که باید هنگام خرید انواع سروو موتور به طور مثال سروو Delta به آن دقت کنید را برای شما آورده ایم و تمام راه کارها و فرمول های لازم به طور کامل شرح داده شده است.
| مراجع | توضیح |
| — | اندازه ، جرم ، ضریب اصطکاک و نیروهای خارجی کلیه قسمت متحرک سروو موتور را که روی چرخش آن تأثیر می گذارد ، تعیین کنید. |
| فرمول الگو راه اندازی | تعیین الگوی راه اندازی (رابطه بین زمان و سرعت) هر بخشی که باید کنترل شود.
الگوی راه اندازی هر المان کنترل شده را به الگوی عملیاتی شافت موتور تبدیل کنید. |
| فرمول های اینرسی | عناصر دستگاه می توانند به نحوی که میزن اینرسی بتواند برای قسمت های چرخان سروو موتور محاسبه شود ، تفکیک شوند .
محاسبه اینرسی اعمال شده به هر المان برای محاسبه اینرسی بار کل مقدار تبدیل شافت موتور. |
| فرمول های گشتاور بار | محاسبه گشتاور اصطکاک ، در صورت لزوم ، نیروی اصطکاک را برای هر عنصر محاسبه می کند و برای یک شافت موتور ، آن را به گشتاور اصطکاک تبدیل می کند.
محاسبه گشتاور خارجی در صورت لزوم نیروی خارجی را برای هر عنصر محاسبه می کند و آن را به گشتاور خارجی شافت موتور تبدیل می کند. مقدار گشتاور بار کل برای مقدار تبدیل شافت موتور را محاسبه می کند. |
| — | یک موتور را به طور موقت بر اساس اینرسی بار محور تبدیل شافت موتور ، گشتاور اصطکاک ، گشتاور خارجی و r.p.m (تعداد دور موتور در دقیقه )یک موتور انتخاب کنید. |
| فرمول های افزایش / کاهش گشتاور | افزایش / کاهش گشتاور را از اینرسی بار یا الگوی راه اندازی محاسبه کنید. |
| محاسبه گشتاور لحظه ای ماکسیمم و محاسبه گشتاور موثر | گشتاور لازم را برای هر قسمت از الگوی راه اندازی از گشتاور اصطکاک ، گشتاور خارجی و افزایش / کاهش گشتاور محاسبه کنید.
تأیید کنید که حداکثر مقدار گشتاور برای هر قسمت راه اندلزی (حداکثر گشتاور لحظه ای) کمتر از حداکثر گشتاور لحظه ای موتور است. برای هر بخش عملیاتی ، گشتاور مؤثر را از گشتاور محاسبه کرده و تأیید کنید که این مقدار کمتر از گشتاور دارای امتیازبرای موتور است. |
| لطفاً دفترچه راهنماي هر يك از محصولات را برای جزئیات بیشتر در خصوص محاسبه انرژی احیا کننده بررسی کنید. | انرژی احیا کننده را از گشتاور کلیه قسمتهای متحرک محاسبه کنید. |
| دقت موقعیت یابی | بررسی کنید که تعداد پالس های انکودر با وضوح مشخص شده سیستم مطابقت دارد یا خیر. |
| جدول زیر | بررسی کنید که آیا محاسبات با مشخصات موتور موقت انتخاب شده مطابقت دارد یا خیر. اگر اینطور نیست ، موتور موقت انتخاب شده را عوض کنید و دوباره آن را محاسبه کنید. |
| آیتم های که باید بررسی شوند | آیتم های مشخصی که باید بررسی شوند. |
| اینرسی بار ≤ اینرسی روتور موتور * نسبت اینرسی قابل اجرا | اینرسی بار |
| گشتاور مؤثر < گشتاور موتور
لطفاً حاشیه ای در حدود 20٪ لحاظ کنید . * |
گشتاور موثر |
| حداکثر گشتاور لحظه ای < حداکثر گشتاور لحظه ای موتور
لطفاً حاشیه ای در حدود 20٪ لحاظ کنید. * برای حداکثر گشتاور لحظه ای موتور از مقداری که با درایور ترکیب شده و خود موتور استفاده کنید. |
گشتاور لحظه ای ماکسیمم |
| حداکثر سرعت چرخش ≤ سرعت چرخش دارای امتیاز موتور
سعی کنید تا حد ممکن به میزان چرخش امتیاز موتور نزدیک شوید. این کار عملکرد یک موتور را افزایش می دهد. برای فرمول ، لطفا به “سرعت مستقیم و سرعت چرخش موتور” مراجعه کنید. |
سرعت چرخش ماکسیمم |
| انرژی احیا کننده <=جذب انرژی احیا کننده موتور هنگامی که انرژی احیا کننده بزرگ است ، یک مقاومت جذب کننده انرژی احیا کننده را متصل کنید تا ظرفیت جذب درایور افزایش یابد. | انرژی احیاکننده |
| اطمینان حاصل کنید که وضوح انکودر با مشخصات سیستم مطابقت داشته باشد. | وضوح انکودر |
| بررسی کنید که آیا فرکانس پالس از حداکثر پاسخ فرکانسی یا حداکثر فرکانس فرمان یک موقعیت سنج تجاوز می کند یا خیر. | ویژگی های موقعیت یاب |
| اطمینان حاصل کنید که مقادیر درجه حرارت / رطوبت محیط کار ، اتمسفر، شوک و لرزش با مشخصات محصول مطابقت داشته باشد. | شرایط راه اندازی |
* هنگام کار با بارهای عمودی و بارهایی که در اثر گشتاور خارجی تحت تأثیر قرار گرفته است ، حدود 30٪ ظرفیت را فراهم می کنید.
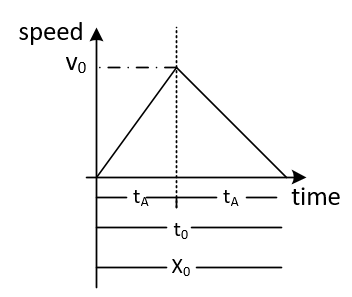
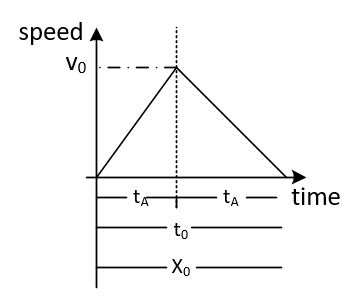
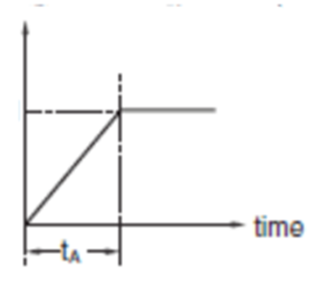
فرمول ها برای الگوهای راه اندازی
| حداکثر سرعت V0=X0/TA
X0 : مسافت طی شده در زمان T0 (mm) V0 : حداکثر سرعت (mm/s)
شیب راه اندازی / توقف tA =X0/V0 t0 : زمان موقعیت یابی (s) tA : شیب راه اندازی / توقف (s)
فاصله سفر X0=V0*tA |
 |
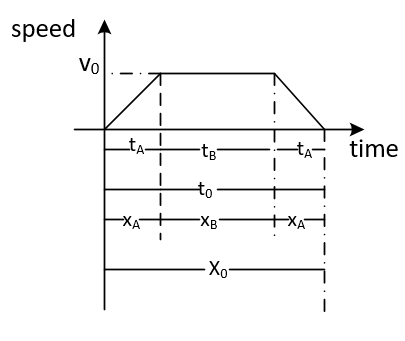
مثلثی | ||||||
| حداکثر سرعت
V0=X0/t0-tA
شیب راه اندازی / توقف tA=t0-X0/V0
زمان سفر کل t0=tA+X0/V0
مقدار ثابت – زمان سفر سرعت X0=V0(t0-tA)
شیب راه اندازی / توقف فاصله سفر XA=V0*tA/2=V0*t0-X0/2
مقدار ثابت – فاصله سفر سرعت XB=V0*tB=2*X0-V0*t0
|
 |
ذوزنقه ای | ||||||
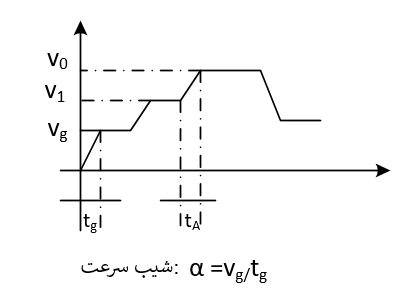
| شیب راه اندازی
tA=V0-Vt/a
شیب راه اندازی (tA) شامل مسافت طی شده XA=1/2a*tA2+V1*tA =1/2*(V0-V1)2/a+V1*tA
سرعت پس از افزایش سرعت V0=V1+a*tA |
 |
سرعت و شیب در حین شیب راه اندازی | ||||||
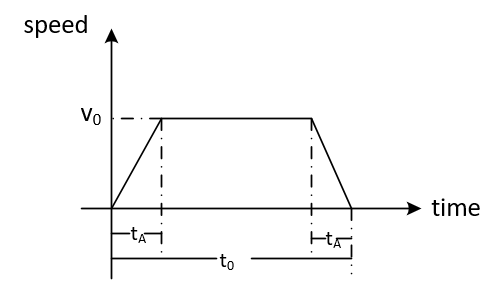
| شرایط راه اندازی ذوزنقه ای
X0< t02*a/4
حداکثر سرعت V0=t0a/2(1-(1-4X0/t0*a)1/2) X0 : فاصله موقعیت یابی(mm) T0 : زمان موقعیت یابی (s) TA : شیب راه اندازی/ توقف(s) V0 : حداکثر سرعت (mm/s) a : گرادیان سرعت
زمان افزایش سرعت tA=V0/a==t0/2(1-(1-4X0/t0*a)1/2) |
|
سرعت وشیب الگو ذوزنقه ای | ||||||
| شرایط راه اندازی مثلثی
X0>= t02*a/4
حداکثر سرعت V0=(a*X0)1/2
زمان افزایش سرعت tA=(X0/a)1/2 |
|
سرعت وشیب الگو مثلثی | ||||||
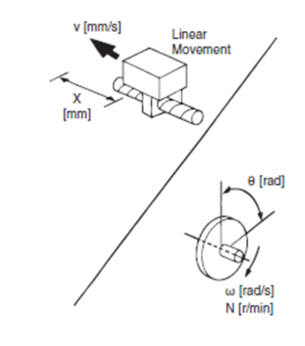
جدول تبدیل واحد ها
W=2*3.14*N/60 N : سرعت چرخشی (r/min) |
|
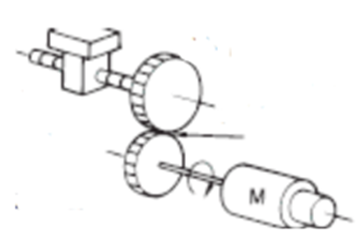
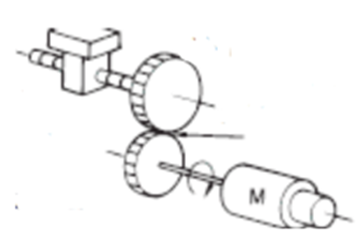
بخش چرخان |
فرمول های اینرسی
| Jw=M(D12+D22)/8*10-6(kg.m2) | 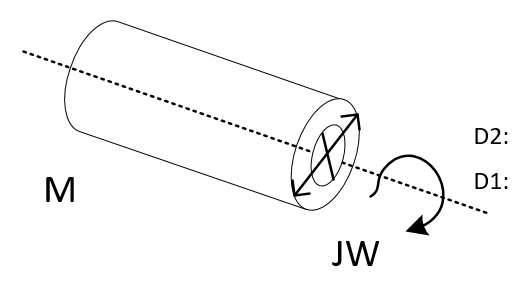
D1 : قطر داخلی استوانه(mm) D2 : قطر خارجی استوانه(mm) M: وزن سیلندر (kg) Jw : اینرسی سیلندر (kg.m2) |
اینرسی استوانه ای |
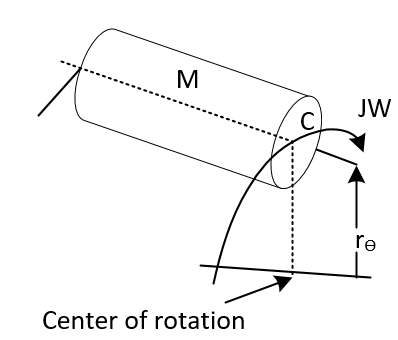
| Jw=Jc+M*re2*10-6(kg.m2) |
M : وزن سیلندر (kg) Jw : اینرسی سیلندر (kg.m2) Re : شعاع چرخشی(mm) Jc : اینرسی اطراف مرکز محور سیلندر |
اینرسی دیسک گریز از مرکز (سیلندری که محورمرکزی را می چرخاند) |
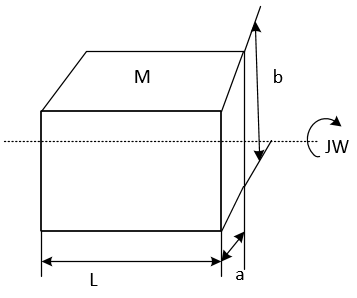
| Jw=M(a2+b2)/12*10-6(kg.m2) |
M: وزن سیلندر مربعی (kg) b: ارتفاع (mm) a: عرض (mm) L: طول(mm) Jw : اینرسی سیلندر (kg.m2) |
اینرسی سیلندر مربعی چرخان |
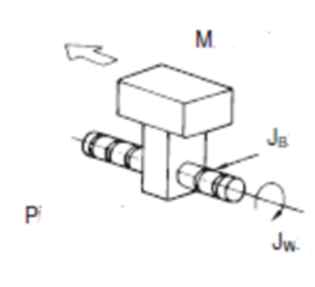
| Jw=M(P/2*3.14)2*10-6+JB(kg.m2) |
M: وزن بار (kg) Jw : اینرسی سیلندر (kg.m2)
|
اینرسی حرکت خطی |
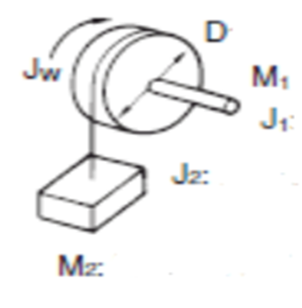
| Jw=J1+J2=(M1*D2/8+M2*D2/4)*10-6(kg.m2) |
D : قطر (mm) M1 : وزن سیلندر J1 : اینرسی سیلندر (kg.m2) J2 : اینرسی به دلیل جسم (kg.m2) M2 : وزن جسم(kg) Jw : اینرسی (kg.m2)
|
اینرسی بلند کردن اجسام با دستگاه کشش |
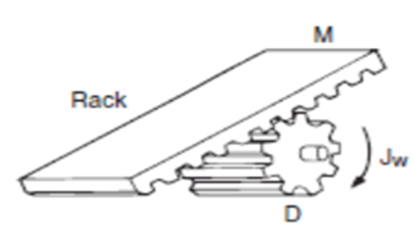
| Jw=M.D2/4*10-6(kg.m2) |
M: وزن (kg) Jw : اینرسی (kg.m2) D : قطر (mm)
|
اینرسی حرکت رک ودندانه دار |
| Jw=D2(M1+M2)/4*10-6(kg.m2) |
1M: وزن (kg) M2: وزن (kg) Jw : اینرسی (kg.m2)
|
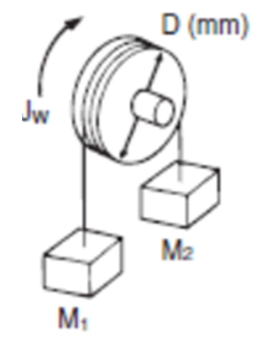
اینرسی تعادل معلق |
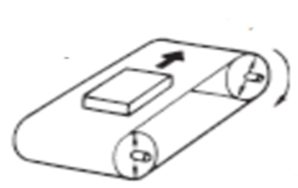
| Jw=J1+J2+J3+J4=
(M1D12/8+M2*D22/8*D12/D22+ M3*D12/4+M4*D12/4)*10-6(kg.m2) |
D1 : قطر سیلندر 1(mm) D2 : قطر سیلندر 2(mm) M1: وزن سیلندر1 (kg) M2: وزن سیلندر2 (kg) Jw : اینرسی سیلندر (kg.m2) J1 : اینرسی سیلندر1 (kg.m2) J2 : اینرسی به دلیل سیلندر2 (kg.m2) J3 : اینرسی به دلیل جسم (kg.m2) J4 : اینرسی به دلیل نقاله (kg.m2) |
اینرسی در حال حمل اجسام با نوار نقاله |
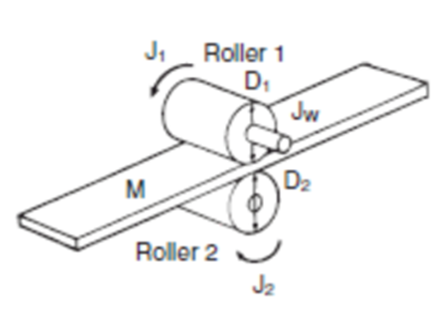
| Jw=J1+(D1/D2)2J2+M*D12/4*10-6(kg.m2) |
D1: قطر رول 1(mm) D2 : قطر رول 2(mm) M: وزن (kg) Jw : اینرسی سیستم (kg.m2) J1 : اینرسی رول 1 (kg.m2) J2 : اینرسی رول 2 (kg.m2) |
اینرسی در جایی که جسم ما بین دو رول قرار دارد |
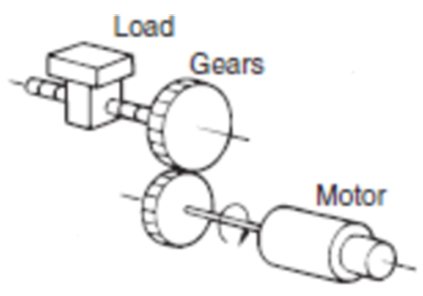
| JL=J1+G2(J2+Jw)(kg.m2) |
Jw : اینرسی بار (kg.m2) Z1 : تعداد دندانه ها در سمت موتور 2Z : تعداد دندانه ها در سمت بار1 J1: اینرسی دنده در سمت موتور(kg.m2) J2 : اینرسی دنده در سمت بار(kg.m2) JL : اینرسی تبدیل بار شافت موتور(kg.m2) G: نسبت دنده Z1/Z2
|
اینرسی مقدار بار تبدیل شده به شافت موتور |
فرمول های گشتاور بار
| Tw=F.P/2*3.14*10-3(N.m) |
F: نیرو خارجی (N) Tw : گشتاور به دلیل نیرو خارجی (N.m) P : گام پیچ (mm)
|
گشتاور در مقابل نیروی خارجی |
| Tw=UMg*P/2*3.14*10-3(N.m) |
M : وزن بار(kg) Tw : گشتاور نیرو های اصطکاکی (N.m) P : گام پیچ (mm) U : ضریب اصطکاکی گام پیچ g: شتاب به دلیل نیرو گرانش (9.8 m/s2) |
گشتاور در مقابل نیروی اصطکاکی |
| Tw=F*D/2*10-3(N.m) |
D : قطر (mm) F: نیرو خارجی (N) Tw : گشتاور به دلیل نیرو خارجی (N.m) |
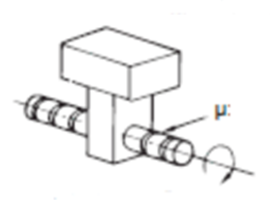
گشتاور زمانی که نیروی خارجی به جسم چرخان اعمال می شود |
| Tw=F*D/2*10-3(N.m) |
D : قطر (mm) F: نیرو خارجی (N) Tw : گشتاور به دلیل نیرو خارجی (N.m)
|
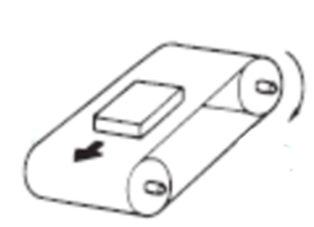
گشتاور جسم روی نوارنقاله در هنگامی که نیروی خارجی اعمال می شود. |
| Tw=F*D/2*10-3(N.m) |
D : قطر (mm) F: نیرو خارجی (N) Tw : گشتاور به دلیل نیرو خارجی (N.m)
|
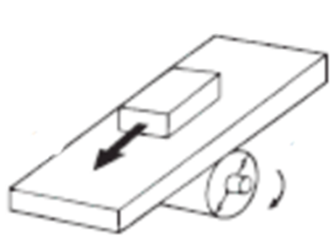
گشتاور یک شی که نیروی خارجی با استفاده از قفسه و رینگ اعمال می شود |
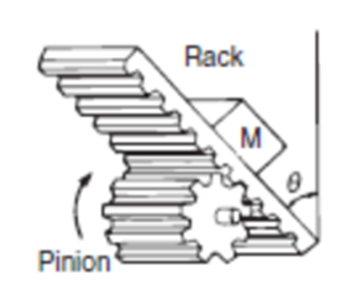
| Tw=Mg*cos O*D/2*10-3(N.m) |
M : وزن بار(kg) Tw : گشتاور خارجی (N.m) g: شتاب به دلیل نیرو گرانش (9.8 m/s2) D : قطر (mm)
|
گشتاور در هنگامی که جسم تحت زاویه بالا کشیده می شود. |
| TL=Tw*G/n(N.m) |
Tw : گشتاور بار (N.m) TL : گشتاور بار تبدیل شافت موتور (N.m) n: اثر انتقال دنده Z1 : تعداد دندانه های دنده در سمت موتور Z2: تعداد دندانه های دنده در سمت بار G=Z1/Z2 ضریب (کاهش سرعت ) دنده
|
گشتاور مقدار بار منتقل شده به شافت موتور |

فرمول گشتاور افزایش سرعت / کاهش سرعت
| گشتاور افزایش سرعت / کاهش سرعت (TA)
TA=2*3.14*N/60tA(JM+Jl/n) (N.m)
|
n: اثر انتقال دنده N : سرعت چرخش موتور (r/min) JM : اینرسی موتور (kg.m2) JL : اینرسی تبدیل بار شافت موتور(kg.m2) سرعت (سرعت چرخشی)
زمان افزایش سرعت (s) N : سرعت چرخش (r/min) TA : گشتاور افزایش سرعت / کاهش سرعت(N.m)
|
محاسبه ماکسیمم گشتاور لحظه ای، گشتاور موثر
| ماکسیمم گشتاور لحظه ای(T1)
T1=TA+TL (N.m)
گشتاور موثر
|
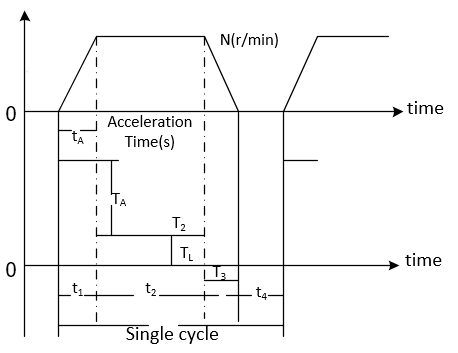
TA : گشتاور افزایش سرعت / کاهش سرعت(N.m) TL : گشتاور بار منتقل شده شافت سروو موتور (N.m) T1 : ماکسیمم گشتاور لحظه ای (N.m) Trms : گشتاور موثر (N.m) |
دقت تثبیت موقعیت
| دقت تثبیت موقعیت (Ap)
AP= P*G/R*S (mm) |
Z1 : تعداد دندانه های دنده در سمت موتور Z2: تعداد دندانه های دنده در سمت بار G=Z1/Z2 ضریب (کاهش سرعت ) دنده AP : دقت تثبیت موقعیت R : رزولوشن انکودر (پالس/ چرخش) S : چند برابر کننده موقعیت P : گام پیچ (mm)
|
سرعت خط مستقیم و سرعت چرخش موتور
| چرخش های موتور
N=6.*V/P*G (r/min) |
V :سرعت (mm/s) Z1 : تعداد دندانه های دنده در سمت موتور Z2: تعداد دندانه های دنده در سمت بار G=Z1/Z2 ضریب (کاهش سرعت ) دنده P : گام پیچ (mm) N : سرعت چرخش موتور (r/min) |