گشتاور موتورهای القایی

گشتاور موتورهای القایی
هر سیستم چرخشی با روتور و استاتور در حال حرکت، دارای گشتاور cogging است. چرا که مقاومت مغناطیسی مدار مغناطیسی به عنوان تابعی از زاویه روتور متغیر است. هنگامی که روتور از مکان اولیه خود که دارای مقاومت مغناطیسی کمی بوده به سمت مکانی با مقاومت مغناطیسی بالا جابه جا می شود، گشتاوری وجود دارد که در مقابل این جابه جایی مقاومت می کند. هنگامی که روتور از نقطه ای با بالاترین مقاومت مغناطیسی عبور می کند، گشتاور موتورهای القایی تمایل دارد که آن را به نقطه ی بعدی با مقاومت مغناطیسی پایین مجذوب کند. بدین صورت یک شکل موج گشتاور متناوب ایجاد می شود. جهت کسب اطلاعات بیشتر مقاله گشتاور چیست را مطالعه نمایید.
گشتاور cogging موتورهای القایی، گشتاوری در نتیجه ی عکس العمل های بین روتور آهنربای دائم و شکاف های استاتور یک ماشین آهنربای دائم است که به عنوان گشتاور بدون جریان نیز شناخته می شود. این گشتاور به مکان وابسته است. دوره تناوب در هر دور موتور به تعداد قطبهای مغناطیسی و دندانه های استاتور بستگی دارد. گشتاور cogging یک جزء ناخواسته برای عملکرد چنین موتوریست که خصوصا در سرعت پایین بسیار چشمگیر است. این گشتاور مانند ریپل سرعت موجب تولید گشتاور می شود اگرچه در سرعت بالا اینرسی لحظه سکون موتور ، اثرات گشتاور cogging را حذف می کند.
گشتاور ضربانی غالبا برای درایوهای الکتریکی مضر است. زیرا باعث پخش نویز و لرزش می گردد که باید حذف شود. گشتاور ضربانی یک ماشین سنکرون آهنربای دائم، مجموع گشتاور cogging و ریپل گشتاور است. اگر نمودار ولتاژ القا شده ماشین یا اینورتر قدرت، محتوای هارمونیکی داشته باشند ریپل گشتاور ایجاد می شود.
گشتاور cogging
یک ماشین آهنربای دائم سنکرون چندین قطب آهنربایی و چند شکاف دارد. اگر لبه ی قطب مغناطیسی از دهانه ی شکاف عبور کند،گشتاور ضربانی تولید می شود که تابعی از طرح دهانه ی شکاف و قطب مغناطیسی است. دهانه شکاف یکسان با قطب مغناطیسی مختلف، شکل موج cogging کاملا متفاوتی را ایجاد می کنند. سعی طراحان بر ساخت قطب مغناطیسی ای با شکل موج cogging بهینه است. هر چه دهانه شکاف عریض تر باشد، دامنه ی وسیع تری برای شکل موج cogging تولید می کند. شیب این شکل موج تابعی از شکل قطب آهنرباست. در صورتیکه عرض آهنربا ثابت باشد، شکل موج cogging مانند قسمت قرمز رنگ شکل زیر است. اگر عرض آهنربا در وسط آن ماکزیمم باشد و به سمت لبه های قطب باریک شود، شیب شکل موج گشتاور cogging کم تر می شود.
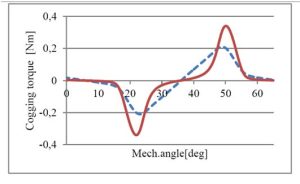
شکل 1
نمودار گشتاور cogging تک
قطب مغناطیسی برای شکل
قطب مغناطیسی مختلف
تفاوت ریپل گشتاور و گشتاور cogging
اگر چه اجزاء موتور بسیار گسترده و متفاوت است، اجزای اصلی آن روتور و استاتور هستند. به طور رایج، روتور به بار متصل شده و در نتیجه ی دفع میدان مغناطیسی روتور و استاتور می چرخد. برای اینکه موتور به چرخش ادامه دهد، گرایش مغناطیسی آن باید در فواصل معین تغییر جهت دهد. فرکانسی که در آن تغییر جهت رخ می دهد به تعداد قطبهای مغناطیسی در روتور/استاتور بستگی دارد که می تواند از 2 تا n متغیر باشد.

شکل 2 : موتور DC دو قطب جاروبک دار
فعل و انفعالات بین میدانهای مغناطیسی از یک منحنی سینوسی پیروی می کند. بدین صورت که به صورت غیرخطی به عنوان تابعی از زاویه روتور تغییر می کند. نتیجه پایانی، یک ریپل در گشتاور پیک به عنوان تابعی از زمان است. هر چند افزایش تعداد قطبها می تواند موجب کاهش سطح ریپل گشتاور شود، اما بر هزینه و پیچیدگی می افزاید
این گشتاور زمانی تولید می شود که دندانه های روتور با دندانه های استاتور تنظیم می شود و موتور نیازمند گشتاور جهت شکست این جاذبه است. در مورد یک سرو موتور، این گشتاور زمانی که حرکتی را شروع یا به آن خاتمه می دهد، بر روی عملکرد موتور تاثیر گذار است
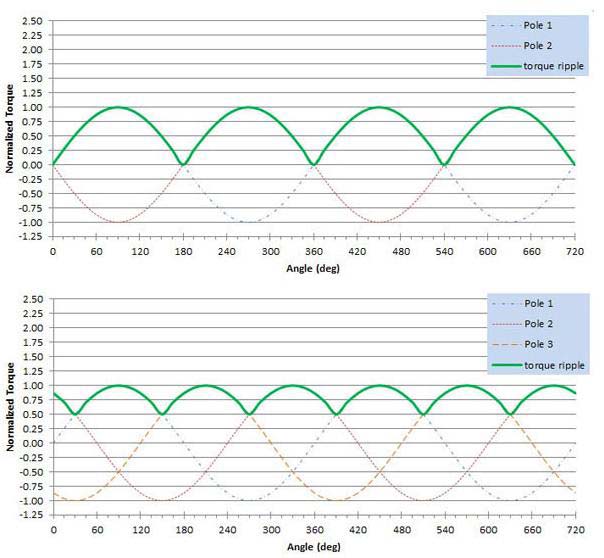
(به علت اینکه گشتاور موتور الزاما یک تابع سینوسی است، معکوس نمودن جریان موجب ایجاد ریپل گشتاور می گردد. (شکل بالا
(افزایش تعداد قطبها و تنظیم دقیق سیم پیچی هامی تواند ریپل را به حداقل رساند اما نمی تواند به طور کلی آن را حذف کند. (شکل پایین