گشتاور چیست
گشتاور موتور چیست
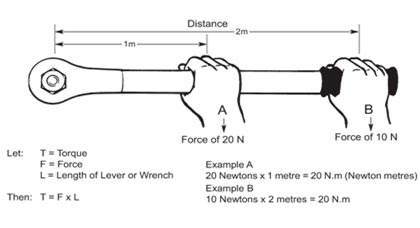
در هر حرکت چرخشی یک کمیت فیزیکی بنام گشتاور وجود دارد که واحد آن نیوتون – متر است. گشتاور یک کمیت نسبی است و نسبت به یک نقطه مبداء سنجیده شده و بر حسب رابطه مقابل محاسبه می گردد. T=f.r
عکس بالا نشان می دهد که چگونه شما torque ثابتی به یک مهره وارد می کنید. در حالیکه مقدار نیروی متفاوتی صرف این عمل می شود. زمانیکه شما از قسمت A بر مهره فشاروارد می کنید. مقدار نیروی مورد نیاز 20N است و زمانیکه از ناحیه B بر مهره فشار وارد می کنید. مقدار نیروی مورد نیاز 10N خواهد بود.
با توجه به رابطه اصلی گشتاور (T=F.R) میزان گشتاور با افزایش مقدار R و ثابت نگه داشتن نیرو بیشتر خواهد شد. جهت کسب اطلاعات بیشتر میتوانید مقاله گشتاور موتورهای القایی را مطالعه نمایید.
مد کنترل گشتاور چیست
مد کنترل گشتاور برای برخی کاربردها نظیر دستگاه های کشش و سیم جمع کن و…. کاربرد دارد، که در اصطلاح به آن Tension می گویند. در این کاربردها نیاز به داشتن torque ثابت است.
بطور مثال در سیم جمع کن زیر از یک motion controller برای کنترل موتورهای متصل به سیم جمع کن استفاده شده است. ولی اگر از لحاظ اقتصادی امکان استفاده از یک کنترلر وجود نداشته باشد. بهترین راه استفاده از یک سرو موتور برروی سیم جمع کن در مد کاری torque است.
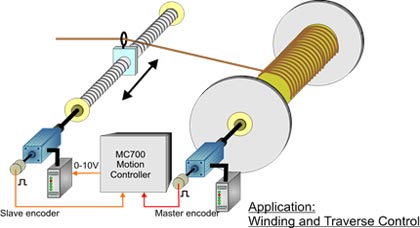
مقدار سیم ورودی در واحد زمان همان طور که قابل استنباط است ثابت می باشد. ولی مقدار سیم جمع شده برای یک قرقره خالی نسبت به یک قرقره تا نیمه پر شده متفاوت است و این تفاوت باعث فشار بر روی سیم می شود. بنابراین باید از سرعت قرقره جمع کن با افزایش قطر سیم جمع کن کاسته شود تا مقدار سیم جمع شده در واحد زمان همچنان ثابت باشد.
همانطور که اشاره شد با افزایش قطر قرقره جمع کننده سیم ها میزان torque اعمال شده روی سیم و در نهایت موتور افزایش می یابد. بدین ترتیب با گرفتن فید بک از موتور می توان مقدار گشتاور ثابتی بر روی سیم ایجاد کرد که این کار با تنظیم سرعت موتور امکان پذیر است.
کنترل سروو در مد گشتاور
روش کار برای یک سروو موتور به این صورت است که ابتدا سرو موتوردر مد کاری گشتاور قرار می گیرد. سپس یک مرجع گشتاور بطور مثال ورودی آنالوگ 0~10v که اغلب سروو درایوها دارند و بطور مثال برای سرو موتور استون و سری پرونت پین های ورودی 26 و 27 سوکت CN1 می باشند به سرو درایو اعمال می شود.
از آن پس با هر تغییر مقدار آنالوگ مرجع ورودی سرو موتور با تغییر سرعت موتور سعی در تطبیق گشتاور خروجی موتور با مقدار مرجع دارد. بطوریکه اگر torque ورودی مرجع بیشتر از گشتاور خروجی سروو درایو باشد؛ سروو درایو سرعت سروو موتور را تا رسیدن به گشتاور مورد نظر و یا رسیدن به حداکثر دور نامی موتور افزایش می دهد. بهمین ترتیب اگر مقدار گشتاور رفرنس اعمالی به درایو کمتر از گشتاور خروجی سروو درایو باشد موتور سرو شروع به کاهش سرعت سروو موتور خواهد کرد.
نکات عملی :
- برای کنترل صحیح یک سرو موتور در مد گشتاور انتخاب صحیح موتور، گیربکس و… از اهمیت بسیاری برخوردار است.
- تنظیمات پارامترهای PID در یک کاربرد tension موجب عملکرد مطلوب سرو موتور در مد کاری Torque خواهد شد.
- از اینورترها نیز برای کنترل بارها در مد کاری Torque استفاده می شود، که به مقدار خیلی زیاد کارآیی آن بسته به برنامه vector نوشته شده بر روی اینورتر دارد.
از نمونه اینورتر های مناسب برای کاربردهای tension در برند اینورتر دلتا می توان به سری اینورتر delta c2000 اشاره کرد.
- اگر در کاربرد سرو موتور خود با مواردی نظیر برعکس شدن دور موتور زمانی که موتور زیر بار کامل قرار می گیرد و یا عدم راه اندازی بعد از توقف کامل روبرو شدید بهتر است نکات عملی این بخش را بار دیگر مطالعه نمایید.





خیلی خوب بود مرسی