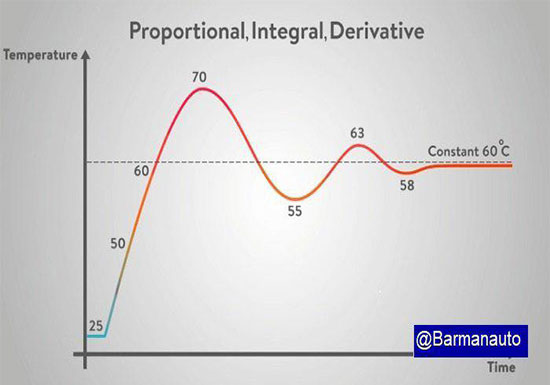
تنظیمات pid کنترل دما
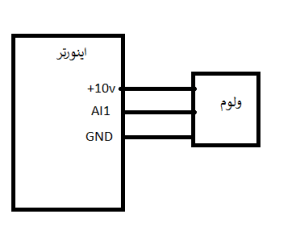
نحوه اتصال پتانسیومتر به اینورتر
اکثر برنامه های اینورتر به موتور AC احتیاج دارند که با سرعت مشخصی مطابق صفحه کلید، پتانسیومتر یا ورودی آنالوگ تنظیم شود. برخی از اینورترها گزینه های جایگزین را ارائه می دهند که امکان کنترل دقیق فرایند را از طریق یک کنترلر setpoint یا حالت عملکرد PID فراهم می کند. بسیاری از اینورترها ها به یک کنترلر داخلی متناسب-انتگرال مشتق (PID) مجهز شده اند.
نحوه نصب پتانسیومتر به اینورتر از اتصال سه سیمه استفاده می شود. برای این کار از سه ترمینال اصلی اینورتر استفاده می شود که قابل مشاهده است. در ادامه نحوه اتصال آن قابل مشاهده است.
کنترل حلقه بسته می تواند برای ثابت نگه داشتن دما، فشار و غیره مورد استفاده قرار بگیرد. اینورتر ورتکس و یا اینورتر دلتا این ویژگی را به صورت پیش فرض روی خود دارا هستند، بنابراین تعداد کمی از قطعات خارجی مورد نیاز است. در این مقاله علاوه بر معرفی PID کنترل با اینورترتلاش می کنیم راه اندازی PID کنترل با اینورتر ورتکس را برای کاربردهای مختلف معرفی کنیم. البته در نظر داشته باشید برای اینکار از اینورتر دلتا نیز می توان استفاده کرد. می توانید برای اطلاع از قیمت اینورتر با نمایندگی دلتا تماس بگیرید.
کنترل حلقه باز و حلقه بسته
در ابتدا باید در مورد تفاوت بین کنترل حلقه باز و بسته صحبت کنیم. به عنوان مثال اگر ما پمپی داشته باشیم که بخواهیم در خروجی اش فشار آب ثابتی را به ما بدهد، می توانیم سرعت اینورتر روی آن را به صورت دستی روی مقدار ثابتی قرار دهیم و امیدوار باشیم که فشار در تمامی لحظات روی مدار ثابت بماند، و شب ها هم می توانیم کمی سرعت اینورتر را کم کنیم.
نحوه اتصال سنسور فشار به اینورتر
این کنترل حلقه باز است. راه حل بهتر بکارگیری یک سنسور فشار و اتصال سیگنال آن به اینورتر است. اینورتر مقدار واقعی (یعنی اندازه گیری شده) فشار را با مقدار مطلوب (نقطه مرجع مورد نظر) مقایسه می کند و سرعت پمپ را دائما تغییر می دهد تا فشار را در مقدار ثابتی نگه دارد. از آنجا که اتصال سنسور فشار یک حلقه تشکیل می دهد (اینورتر-موتور-پمپ-سنسور) این سیستم ها به سیستم های کنترلی حلقه بسته شهرت دارند؛ یک نمونه از نحوه اتصال سنسور فشار به اینورتر در شکل 1 به نمایش در آمده است.
شکل1 : مثال سیستم کنترل حلقه بسته
کنترل حلقه بسته کاربردهای زیادی دارد، از سیستم های تثبیت کننده هواپیما گرفته تا کنترل تنش در سیستم های سیم پیچی، و همچنین کاربردهای ساده تری مثل تثبیت فشار، سرعت جریان، یا دما. مسئله مهم در کنترل حلقه بسته، پایداری است. در این سیستم با پردازش صحیح خطا می توان پایداری را ایجاد کرد. خط اتلاف بین نقطه مرجع و مقدار واقعی، سیگنال فیدبک یا اندازه گیری است. خطا به سیستم کنترلی داده می شود که در اینجا همان اینورتر است. اینورتر باید بتواند با پردازش سریع خطای موجود را پردازش و برطرف کند.
تنظیم pid کنترلر با اینورتر
در یک کاربرد رایج برای سیستم پمپاژ، نقطه مرجع فشار را می توان با استفاده از یک ورودی آنالوگ یا مقدار ثابت تنظیم کرد و مقدار واقعی نیز با یک مبدل فشار که به دیگر ورودی آنالوگ اینورتر متصل می شود، تعیین می گردد. خطا دائما سرعت موتور را تغییر می دهد. برای اینکه کنترل خوبی داشته باشیم و همچنین سیستم پایدار بماند، سیگنال خطا باید پردازش شود. اینورتر با استفاده از بهره های تناسبی P، انتگرالی I سیگنال خطا را بهبود می بخشد.
مقدار دیفرانسیلی D خطا به ندرت مورد استفاده قرار می گیرد، اما سه عبارت تناسبی P، انتگرالی I و دیفرانسیلی D خلاصه ای از نام سیستم کنترل حلقه بسته است که سیستم PID می باشد. در نتیجه با تنظیم مقادیر P،I و D می توان هر سیستم حلقه بسته را پایدار کرد. شکل 2 نحوه پردازش خطا در یک سیستم PID را نشان می دهد.
شکل2 : سیستم پمپاژ
تئوری کنترل PID با اینورتر
حلقه PID برای حفظ متغیر فرآیند مانند سرعت استفاده می شود. سرعت مورد نظر، یا نقطه تنظیم و مقدار واقعی سرعت به یک نقطه جمع می شوند. این دو سیگنال از نظر قطبیت با یکدیگر مخالف هستند و هرگاه سرعت مطلوب با سرعت واقعی برابر باشد خطای صفر یا انحراف را به همراه دارد.
اگر دو سیگنال از نظر مقدار متفاوت باشند، بسته به اینکه سرعت واقعی بیشتر یا کمتر از سرعت مورد نظر باشد، یک مقدار مثبت یا منفی خواهد داشت. این سیگنال خطا به کنترل کننده PID وارد می شود.
اصطلاحات متناسب، انتگرال و مشتق، سه عملکرد اصلی ریاضی را توصیف کرده و سپس به سیگنال خطا اعمال می شود. خروجی PID به خطا واکنش نشان می دهد و فرکانس را بیرون می کشد تا سعی کند مقدار خطا را به صفر برساند. وظیفه کنترلر این است که تنظیمات سرعت را به سرعت انجام دهد، و حداقل آن را از بین ببرد.
تنظیم کنترلر PID شامل تنظیمات افزایش زمان و زمان برای بهبود عملکرد و نتیجه گیری در پاسخ سریع با حداقل برآورد بیش از حد است و به موتور اجازه می دهد تا به سرعت در سرعت جدید قرار بگیرد. برخی از اینورتر ها دارای یک عملکرد خودکار PID با اینورتر هستند که به منظور سهولت روند تنظیم شده است
خروجی نهایی کنترلر PID
KP : بهره تناسبی
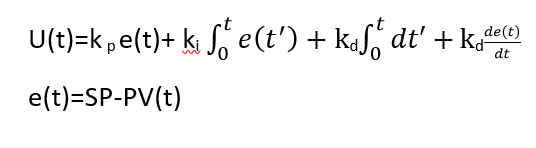
KI: بهره انتگرال
Kd : بهره مشتق
SP: تنظیمات
PV(t):متغییر فرایند
e(t): خطا
t: زمان لحظه ای
P : مقدار خروجی متناسب با مقدار خطای فعلی را بیان می کند. پاسخ متناسب را می توان با ضریب خطا عبارت ثابت KP تنظیم کرد. خروجی کنترلر P، اینورتر انحراف کنترل و تقویت است و انحراف کنترل را بصورت خطی و بدون تأخیر دنبال می کند. انحراف کنترل حفظ می شود.
POUT=KPe(t)
بهره تناسبی بالا باعث تغییر بزرگ در خروجی برای تغییر در خطا می شود. اگر بهره تناسبی خیلی زیاد باشد سیستم می تواند ناپایدار شود. در مقابل اگر بهره تناسبی کوچک باشد منجر به خروجی کوچک نسبت به یک خطای ورودی بزرگ می شود. در نتیجه حساسیت کنترل کننده کمتر می شود.
نمودار1: پاسخ pv به sp برای سه مقدار( kp ki kd) ثابت نگه داشته شده.
خطای حالت پایدار
تفاوت بین خروجی نهایی مطلوب و مقدار واقعی است. یک کنترل کننده تناسبی معمولا با یک خطای حالت پایدار کار می کند. خطای حالت پایدار (SSE) متناسب با بهره فرایند و برعکس متناسب با بهره تناسبی است.
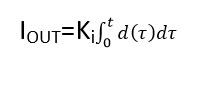
I: انتگرال باعث تسریع روند حرکت به سمت تنظیمات می شود و خطای حالت پایدار باقیمانده را که با یک کنترلر تناسبی خالص رخ می دهد، از بین می برد. خروجی کنترلر I انتگرال انحراف کنترل است. وظیفه کنترلر I از بین بردن انحراف کنترل است. زمان انتگرال سریع انحراف کنترل را جبران می کند.
اگر کنترلر I بسیار پویا تنظیم شود (جبران سریع انحراف ها)، سیستم محرک اینورتر ممکن است ناپایدار و ارتعاش شود. اگر کنترلر I بسیار منفعل تنظیم شود (جبران کند انحراف)، خطای ثابت به اندازه کافی جبران نمی شود. به همین دلیل، قسمت انتگرال باید بطور خاص تنظیم شود.
نمودار 2: پاسخ PV به SP در زمان برای سه مقدار( Kp ,Ki ,kd) ثابت است.
D: عمل مشتق رفتار سیستم را پیش بینی می کند و در نتیجه زمان ثبات سیستم را بهبود می بخشد.عمل مشتق به ندرت مورد استفاده قرار میگیرد. کنترلر D تغییر انحراف کنترل را ارزیابی می کند و سرعت تغییر آن را محاسبه می کند. این مقدار با زمان مشتق ضرب می شود. کنترل کننده D به تغییرات اعلام شده پاسخ می دهد و باعث یک رفتار کنترل سریع می شود. کنترلر D می تواند مدار کنترل اینورتر را تثبیت کند و لرزش را کاهش دهد. از طرف دیگر، خطاها (به عنوان مثال ولتاژهای مداخله) تقویت می شوند.
نمودار3: پاسخ PV به SP در زمان برای سه مقدار (KP,Ki,kd) ثابت است.
کنترل حلقه بسته در سیستم رولینگ
کنترل حلقه بسته برای کاربردهایی همچون تنظیمات pid کنترل دما، فشار و غیره مورد استفاده قرار می گیرد. اما کاربردهای بسیار دیگری نیز وجود دارند، مثل حفظ تنش در یک سیستم سیم پیچی یا رولینگ الیا. که در شکل زیر به نمایش در آمده است.
بازوی لغزنده یک پتانسیومتر را به حرکت در می آورد و پتانسیومتر نیز سیگنال را به اینورتر ارسال می کند تا اینورتر میزان تنش روی ماده در حال پیچیدن را در دست داشته باشد. بنابراین اینورتر می تواند سرعت خود را به گونه ای تنظیم کند که تنش روی ماده و یا الیاف ثابت بماند.
شکل3: سیستم رولینگ به همراه اینورتر ورتکس
در اینورترهای ورتکس پارامترهای اضافی متعددی وجود دارند که مفید هستند. شیب های سرعت را می توان کم کرد تا سرعت پاسخ بهبود یابد، اگر اشکالی در سیستم به وجود آید مثل ترکیدن لوله ها، اینورتر می تواند آن را به صورت هوشمند تشخیص داده و کارکرد را متوقف نماید. اینورتر ورتکس ویژگی های منحصر به فرد مانند کنترل چند پمپه و تکنولوژی اوپتی فلو را در ساختار خود دارا می باشد. این پارامتر ها ویژگی عملی هستند تا سیستم حلقه بسته منعطف تر باشد.
برای اجرای این سیستم با اینورتر به چه صورت عمل کنیم؟
کنترلر PID به صورت پیش فرض روی همه اینورترهای ورتکس مانند اینورتر ورتکس سری ir610 و اینورتر ورتکس سری ir233 موجود است. بنابراین فقط به یک سنسور یا سیگنال فیدبک احتیاج داریم. باید اطمینان حاصل کنیم که سیگنال فیدبک از مبدل مقادیر درستی را نشان می دهد و با تغییر سرعت موتور تغییرات سیگنال فیدبک متناسب است. برای بررسی باید درایو را در حالت حلقه باز روشن نمود.
وقتی که از کارکرد درست سیگنال مبدل اطمینان حاصل کردیم می توانیم کنترل حلقه بسته را فعال کنیم و ببینیم چه اتفاقی خواهد افتاد(P40=0). در نتیجه سیستم درست عمل کرده و پایدار می ماند و نیازی به تنظیمات بیشتر ندارد. اگر به اندازه کافی سیستم پایدار نبود، می توانیم پارامتر P و I را تغییر دهیم. اینورترهای ورتکس گروه تنظیماتی شماره 40 مربوط به تنظیمات ابتدایی و پیشرفته PID است.
معرفی pid کنترل با اینورتر
راه اندازی pid کنترل با اینورتر ورتکس
برای راه اندازی سیستم PID در اینورترهای ورتکس ابتدا باید مرجع فرکانسی P01.00 را بر روی PID 8 قرار داد سپس باید مرجع کنترلر مشخص شود اینورتر ورتکس امکان انتخاب مرجع های مختلفی دارد و در عین حال می توان از دو مرجع فرکانسی همزمان استفاده کرد برای اینکار از پارامتر P40.04 برای مرجع اول و نیز 4 پارامتر P40.06~P40.09 برای انتخاب مرجع دوم. سپس به کمک پارامتر P40.10 از بین مرجع اول یا دوم و یا روابط ریاضی بین آنها می توان مرجع نهایی را انتخاب کرد.
برای انتخاب مرجع فیدبک نیز می توان از پارامتر P40.11 استفاده کرد طوریکه کمیت یکان این پارامتر برای منبع فیدبک اول و کمیت دهگان آن برای انتخاب منبع فیدبک دوم استفاده می شود. در ادامه به کمک پارامتر P40.13 می توان مقدار نهایی فیدبک اعمال شده به اینورتر را مشخص کرد. باید توجه داشت که وجود دومنبع مختلف برای انتخاب مرجع ورودی و یا فیدبک ورودی باعث افزایش قابلیت های اینورتر می شود و شما می توانید تنها از یک منبع برای هر کدام استفاده کنید.
به کمک پارمتر P40.14 روش اعمال فیدبک به سیستم مشخص می شود. اگر P40.14=0 قرار داده شود خروجی PID مثبت انتخاب شده است و هنگامی که مقدار فیدبک از مقدار مرجع PID بیشتر شود فرکانس خروجی اینورتر برای حفظ تعادل PID کاهش می یابد. برای مثال کاربرد کنترل tension هنگام بسته بندی اگرP40.14=1 باشد پس خروجی PID منفی انتخاب شده است. هنگامی که مقدار فیدبک از مقدار مرجعPID بیشتر شود فرکانس خروجی اینورتر برای حفظ تعادل PID افزایش می یابد. برای مثال کنترل tension هنگام باز کردن بسته بندی.
ضرایب کنترلی PID را نیز به کمک پارامترهای P40.17=P, P40.18=I , P40.19=D می توان تنظیم کرد.
شکل زیر کمک شایانی به درک شرایط PID و پارامترهای آن می کند.
علاوه بر تنظیمات فوق در گروه 40 گروه 41 مربوط به پارامترهای تابع خواب هستند. به کمک پارامترهای P41.03 , P41.04 می توان شرایط به خواب رفتن و نیز بیدار شدن اینورتر را تعیین کرد و حالت کلی عملکرد اینورتر در مد SLEEP به کمک پارامتر P41.00 مشخص می شود. در زیر توضیح این پارامتر قابل مشاهده است.
یکان: انتخاب حالت خواب
0: تابع خواب غیرفعال
1: خواب با فرکانس
2: خواب AI1 )AI1 به عنوان فیدبک فشار)
3: خواب AI2 )AI2 به عنوان فیدبک فشار)
4: خواب AI3 )AI3 به عنوان فیدبک فشار)
5: خواب AI4 )AI4 به عنوان فیدبک فشار)
دهگان: انتخاب حالت بیداری
0: تابع خواب غیرفعال
1: بیداری با فرکانس
2: بیداری AI1 )AI1 به عنوان فیدبک فشار)
3: بیداری AI2 )AI2 به عنوان فیدبک فشار)
4: بیداری AI3 )AI3 به عنوان فیدبک فشار)
5: بیداری AI4 )AI4 به عنوان فیدبک فشار)
صدگان: انتخاب جهت خواب وبیدار
0: جهت مثبت
منبع خواب P41.03< (AI4 ~ AI1)، اینورتر خواهد خوابید منبع بیداری P41.04> (AI4 ~ AI1) ، اینورتر از خواب بیدار می شود.
1: جهت معکوس
منبع خواب P41.03> (AI4 ~ AI1)، اینورتر خواهد خوابید
منبع بیداری P41.04< (AI4 ~ AI1)، اینورتر از خواب بیدار می شود
شکل 4: شمای فنی اینورتر ورتکس
هنگامی که منبع خواب و منبع بیداری مقدار یکسانی دارند لطفأ به نسبت مقدار P41.03 و P41.04 توجه کنید. اگر تنظیم پارامتر غیر منطقی باشد، وقتی حالت بیداری انتخاب شده باشد حتی اگر خواب ایجاد شود، حالت خواب نمی تواند وارد شود و هنگام استفاده توجه ویژه ای می شود.
کنترل فشار آب با اینورتر
یکی از کاربردهای اینورتر بویژه در مجتمع های مسکونی کنترل فشار آب ساختمان است. برای مجتمع های بزرگ از بوستر پمپ استفاده می شود و بالطبع اینورترهای نصب شده برای بوستر پمپ ها نیاز به کنترل کننده که عموما یک PLC است دارند.
ولی برای مجتمع های کوچک که تنها یک اینورتر دارند از PID اینورتر کمک گرفته می شود و برای کنترل فشار آب با اینورتر با کمک مد خواب و بیداری تنظیم فشار آب ساختمان اقدام می کند. گفتن این نکته حائز اهمیت است که با یک پرشر سوئیچ آنالوگ بر سر راه خروجی آب قرار گرفته باشد و این پرشر یا اندازه گیر قشاز از طریق ورودی آنالوگ اینورتر به آن متصل می شود و لحظه به لحظه مقدار فشار را به اینورتر فیدبک می دهد.
البته نیاز است یک فشار مرجع هم به اینورتر گزارش شود. که می تواند از طریق پارامترهای داخلی اینورتر و یا از طریق یکی دیگر از ورودی های آنالوگ به ان اعمال گردد. کل داستان کنترل به این قسم است که با کمتر شدن فشار سیستم از فشار مرجع سرعت اینورتر افزایش می یابد و مقدار فشار تزریقی به سیستم بیشتر می شود. بارمان اتوماسیون نمایندگی فروش اینورتر در اصفهان، ارسال به سراسر کشور.






بسیار ممنونم، مفید بود