تنظیم پارامترهای PID سروو موتورها
تنظیم پارامترهای PID سروو موتورها
تنظیم پارامترهای مناسب برای ضرایب PID سروو موتورها همواره یکی از اساسی ترین بخش های تنظیمی برای انواع سروو موتور است. بطوریکه تنظیم اشتباه این پارامترها باعث لرزش موتور، گرم شدن موتور، عدم توانایی در تنظیم دقیق سرعت و یا موقعیت خواسته شده از سروو موتور می شود. در ادامه پارامترهای PID سرووهای ESTUN معرفی می شوند.
روش های تنظیم پارامترهای PID سروو موتور ESTUN
اساس تئوری تنظیم پارامترهای PID سروو موتور
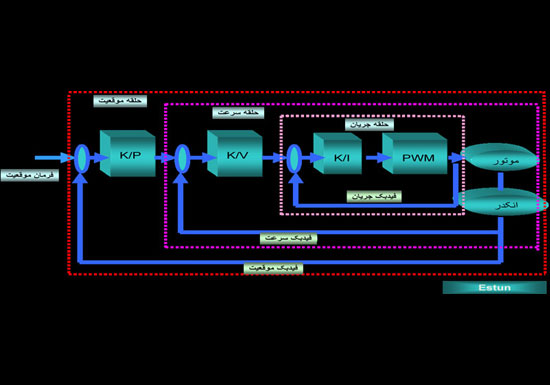
سرو درایو سه حلقه فیدبک دارد: حلقه موقعیت، حلقه سرعت و حلقه جریان. حلقه جریان بالاترین پاسخ دهی را دارا می باشد و حلقه ی سرعت باید پاسخ دهی بیشتری نسبت به حلقه ی موقعیت داشته باشد. عدم رعایت این اصل، موجب لرزش و یا عکس العمل های ناخواسته موتور می گردد. هنگام طراحی سرو درایو، ESTUN بالاترین پاسخ دهی حلقه ی را به جریان اختصاص می دهد.
بنابراین کاربران فقط نیاز به تنظیم بهره ی حلقه موقعیت و حلقه سرعت دارند. در حالت کلی، پاسخ دهی حلقه ی موقعیت نمی تواند سریع تر از حلقه ی سرعت باشد. بنابراین توصیه می شود زمانیکه قصد افزایش بهره ی حلقه موقعیت را دارید، ابتدا بهره ی حلقه سرعت را بالا ببرید. افزایش بهره ی حلقه موقعیت به تنهایی موجب افزایش احتمال لرزش موتور خواهد شد.
در مواردی که نیاز به پاسخ دهی بالای کل سیستم می باشد، نمی توان فقط به پاسخ دهی بالای سیستم سرو (کنترلر،سرو درایو، موتور سرو و انکدر) بسنده کرد همچنین باید به نیرومندی سیستم مکانیکی نیز توجه داشته باشیم. بدین ترتیب، کل سیستم میتواند به عملکرد مطلوبی دست یابد.
بارمان اتوماسیون سایا نمایندگی فروش سروو موتور استون و نمایندگی سروو دلتا در اصفهان و سراسر می باشد.
بهره ی حلقه سرعت PN 102
بهره ی حلقه سرعت در جهت تصمیم گیری برای پاسخ دهی حلقه سرعت استفاده می گردد. در شرایطی که سیستم مکانیکی هیچ لرزشی نداشته باشد، هرچه مقدار این پارامتر بیشتر باشد پاسخ دهی نیز بالاتر است. افزایش نسبت بهره ی حلقه سرعت می تواند موجب نیرومندی سیستم سرو گردد. با این حال در کاربرد واقعی، نسبت بهره ی حلقه سرعت نمی تواند خیلی بزرگ شود وگرنه موجب لرزش کل سیستم سروموتور می گردد.
ثابت زمانی انتگرال حلقه سرعت PN 103
انتگرال حلقه ی سرعت می تواند موجب کاهش ریپل در سرعت موتور گردد. همچنین موجب کاهش پاسخ دهی سرو درایو می شود. انتگرال حلقه سرعت ، تاثیری برای سرعت دنبال کننده ی مرجع موقعیت ندارد. با این حال بالا بودن ثابت زمانی انتگرال حلقه سرعت موجب کاهش پاسخ دهی حلقه سرعت می شود. زمانی که ثابت زمانی را افزایش دهیم ، زمان عکس العمل درایو آهسته می گردد و برای موقعیت یابی زمان بیشتری نیاز دارد. هنگامیکه اینرسی بار بالاست و یا سیستم مکانیکی
تمایل به لرزش دارد، می بایست ثابت زمانی انتگرال حلقه سرعت را افزایش داد. طبق مرجع زیر:
Ti = ثابت زمانی انتگرال
Kv = بهره حلقه سرعت
بهره حلقه موقعیت PN 104
بهره حلقه موقعیت یکی از شاخص های اصلی سیستم سروو موتور ac می باشد و رابطه ی نزدیکی با موتور سروو و بار مکانیکی دارد. در حالت کلی، بهره بالای حلقه موقعیت موجب می شود:
-1 پاسخ دهی بالاتر سرعت موتور
-2 خطای کمتر ردیابی موقعیت
-3 زمان کمتر قرار گرفتن در موقعیت
به هر حال، به توانمندی سیستم مکانیکی مربوط و فرکانس طبیعی بالاتری نیاز است.
ثابت زمانی فیلتر مرجع گشتاور PN 105
گاهی اوقات تغییر ناگهانی گشتاور ممکن است سبب ساز سر و صدای زیاد در ماشین شود. افزایش ثابت زمانی فیلتر مرجع گشتاور می تواند موجب کاهش و یا حذف سر و صدای ناخواسته سیستم مکانیکی گردد. با این حال ثابت زمانی انتگرال، میتواند موجب کاهش پاسخ دهی کل سیستم گردد. بنابراین مقدار این پارامتر را بالا تنظیم ننمایید.
روشهای تنظیم مرجع
1. بهره حلقه موقعیت را روی یک مقدار کم تنظیم نمایید و سپس تحت شرایطی که نویز و لرزش غیر طبیعی اتفاق نیفتد، بهره ی حلقه سرعت را پله به پله تا مقدار نهایی افزایش دهید.
2. در حالیکه بهره حلقه موقعیت را افزایش میدهید، مقدار بهره ی حلقه ی سرعت را پله به پله کاهش دهید. تحت شرایطی که هیچ پاسخ دهی بیش از تنظیم و لرزش وجود نداشته باشد، بهره حلقه موقعیت را ماکزیمم نمایید.
3. ثابت زمانی انتگرال حلقه سرعت بر طبق زمان موقعیت یابی تصمیم گیری می شود. لطفا این مقدار را در شرایطی که سیستم مکانیکی هیچ لرزشی ندارد، مینیمم کنید.
4. متعاقبا بهره حلقه موقعیت، بهره حلقه سرعت و ثابت زمانی انتگرال حلقه سرعت با تنظیم جزئی پله به پله بهینه نمایید.
اعداد مطلوب برای کاربردهای رایج به قرار زیر است.
Pn100=0 Pn102=600 Pn103=200 Pn104=80
برای اطلاع از قیمت و خرید انواع سروو موتور از برندهای دلتا، ورتکس و خرید با گارانتی از نمایندگی رسمی با کارشناسان فروش بارمان در تماس باشید.