کنترلر دور موتور سه فاز با استفاده از اینورتر










استفاده از اوپتوکوپلر Zero Crossing Detector
اوپتوکوپلر های سری Moc دارای مدارهای کنترل تریاک که قابلیت پیکربندی بسیار مطمئن و آسان دارند، امکان یکپارچه سازی PWM بدون مشکل را برای کنترل های موردنظر فراهم می کند.
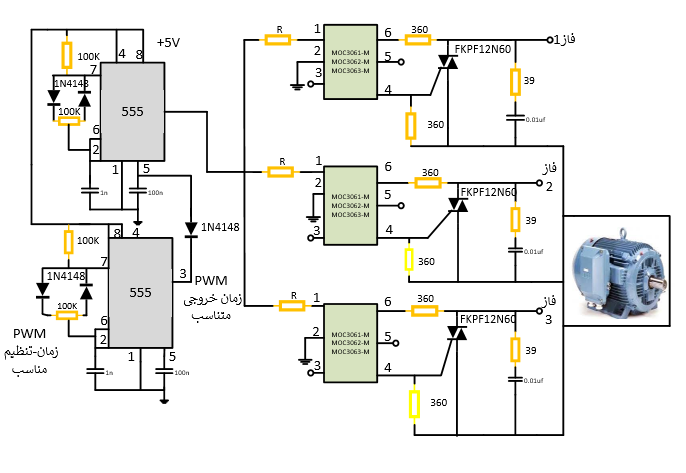
در اینجا از یک روش یکسان برای اجرای مدار کنترل دور موتور ac القایی 3 فاز پیشنهادی استفاده می کنیم، تصویر زیر نحوه انجام این کار را نشان می دهد:
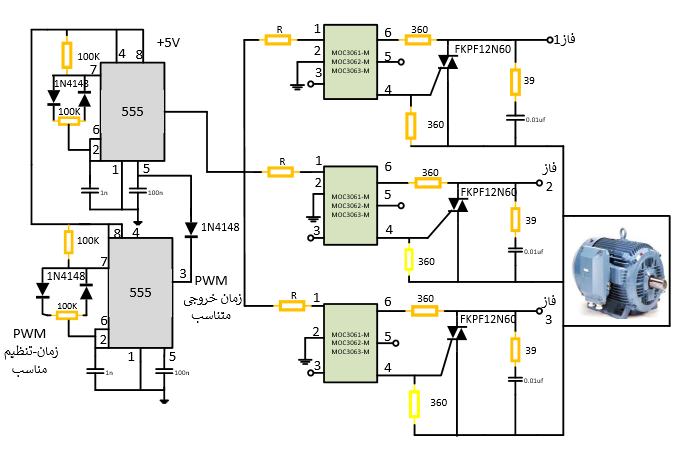
شکل 1:مدار اینورتر سه فاز
عملکرد کنترلر موتور مدار اینورتر سه فاز
در شکل می توانیم سه اوپتوکوپلر سری MOC مشابه پیکربندی شده را در مد تنظیم کننده استاندارد تریاک و در سمت ورودی با یک مدار ساده IC 555 PWM یکپارچه مشاهده کنید. 3 مدار MOC برای جابجایی ورودی 3 فاز AC و تحویل آن به موتور القایی (انواع سروو موتور) متصل پیکربندی شده اند. ورودی PWM در قسمت كنترل LED ایزوله از Opto، نسبت خرد كردن ورودی 3 فاز AC را كه توسط MOC ICS پردازش می شود، تعیین می كند.
استفاده از کنترلر (IC 555 PWM سوئیچ ولتاژ صفر)
این بدان معناست که با تنظیم PWM همراه با 555 IC می توان سرعت موتور القایی را به طور موثر کنترل کرد. خروجی در پین شماره 3 خود با دوره کاری متفاوتی همراه است که به نوبه خود تریاک های خروجی را بر این اساس سوئیچ می کند، در نتیجه مقدار موثر AC را افزایش یا کاهش می دهد.
افزایش مقدار موثر از طریق PWM های وسیع تر امکان دستیابی به سرعت بیشتر در موتور را فراهم می کند، در حالی که کاهش مقدار موثر AC از طریق PWM های باریک اثر متضاد ایجاد می کند، این امر باعث می شود موتور نسبتاً کند شود.
ویژگی های فوق با دقت و ایمنی زیادی پیاده سازی می شود زیرا IC ها با بسیاری از ویژگی های پیشرفته داخلی اختصاص داده شده اند. به طور خاص برای راه اندازی تریاک ها و بارهای القایی سنگین مانند موتورهای القایی، سلونوئید ولو ها، کنتاکتورها، رله های حالت جامد و غیره در نظر گرفته شده است.
قابلیت IC ها
IC همچنین یک عملکرد کاملاً ایزوله از مرحله DC را تضمین می کند که به کاربر اجازه می دهد بدون ترس از برق گرفتگی ، تنظیمات را انجام دهد.
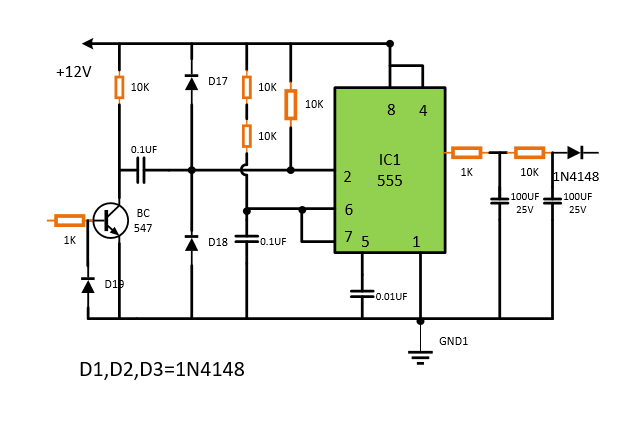
این اصل همچنین می تواند به طور مؤثر برای کنترل سرعت موتور تک فاز، با استفاده از یک MOC IC تکی به جای 3 MOC استفاده شود. این طرح در واقع براساس تئوری time proportional triac drive است. مدار بالایی IC555 PWM ممکن است برای تنظیم 50٪ دوره کاری در فرکانس بسیار بالاتر تولید شود، در حالی که مدار PWM پایین تر ممکن است برای اجرای عملکرد کنترل سرعت موتور القایی از طریق تنظیمات مرتبط استفاده شود.
IC 555 فرکانس نسبتاً کمتری نسبت به مدار بالایی IC 555 ارائه می دهد. این کار ممکن است با افزایش ظرفیت خازن پین شماره 6/2 به حدود 100nF انجام شود.
توجه: اضافه کردن سلف های مناسب در سری های با سیم های فاز می توانند به طرز حیرت انگیزی عملکرد کنترل سرعت سیستم را بهبود بخشند.
شکل موج سینوسی و کنترل فاز با استفاده از مفاهیم مذکور :
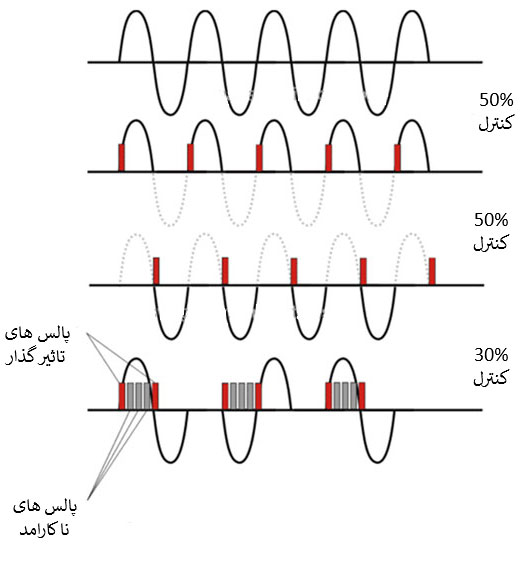
شکل 2:شکل موج مدار کنترلر سرعت موتور سه فاز
راه اندازی موتور سه فاز با اینورتر
در مورد کنترلر موتور القایی 3 فاز در واقع کاملاً خام است، زیرا هیچ کنترل V / Hz (ولت بر هرتز ) ندارد. به سادگی از سوئیچینگ شبکه روشن کردن / خاموش کردن با سرعت های مختلف استفاده می کند تا یک قدرت متوسط به موتور تولید شود و سرعت را با تغییر مقدار متوسط AC کنترل کند.
تصور کنید که موتور را 40 بار یا 50 بار در دقیقه به صورت دستی روشن یا خاموش کنید. این امر باعث می شود سرعت موتور در یک مقدار متوسط نسبی کاهش یابد، اما همچنان به طور پیوسته حرکت کند. اصل فوق به همان روش کار می کند.
رویکرد فنی تر طراحی مداریست که بتواند کنترل صحیح مناسب نسبت V / Hz را تضمین کند و بسته به سرعت لغزش یا هرگونه نوسان ولتاژ، سرعت را به صورت خودکار تنظیم کند.
برای این امر اساساً مراحل زیر را انجام می دهیم
- مدار درایور H-Bridge یا Full Bridge IGBT
- ژنراتور 3 فاز برای تغذیه مدار پل کامل
- پردازنده PWM V / Hz
استفاده از مدار کنترل پل کامل IGBT
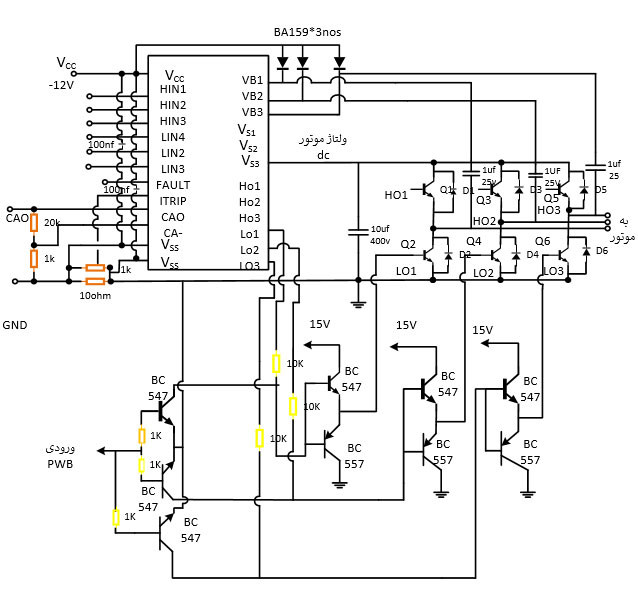
شکل 3:مدار کنترل پل کامل IGBT
مدار نشان داده شده در شکل فوق با بهره گیری از یک درایور تمام تراشه IRS2330 است که دارای کلیه ویژگی های داخلی به منظور جلب رضایت از یک موتور ایمنی و کامل 3 فاز است. برای تولید خروجی نوسان کننده 3 فاز مورد نیاز ، فقط IC به یک منطق 3 فاز همزمان هماهنگ نیاز دارد که در نهایت برای کار با شبکه پل کامل IGBT و موتور 3 فاز متصل استفاده می شود.
کنترل دور موتور ac با pwm از طریق 3 مرحله درایور پل نیمه NPN / PNP جداگانه اجرا می شود، با یک منبع تغذیه SPWM از یک مولد IC 555 PWM کنترل می شود، همانطور که در طرح های قبلی ما مشاهده می شود. این سطح PWM ممکن است در نهایت برای کنترل سرعت موتور القایی استفاده شود.
قبل از یادگیری روش کنترل سرعت واقعی برای موتور القایی، ابتدا باید دانست که چگونه می توان کنترل اتوماتیک V / Hz را با استفاده از چند مدار IC 555، همانطور که در زیر بحث شده است، بدست آورد.
مدار پردازنده اتوماتیک V / Hz PWM (حلقه بسته)
در بخش های فوق طرح هایی را مشاهده کردید که به موتور القایی کمک می کند تا با سرعتی که توسط سازنده مشخص شده است حرکت کند، اما براساس نسبت V / Hz ثابت تنظیم نمی شود، مگر اینکه پردازنده PWM زیر با تغذیه ورودی H-Bridge PWM یکپارچه شود.
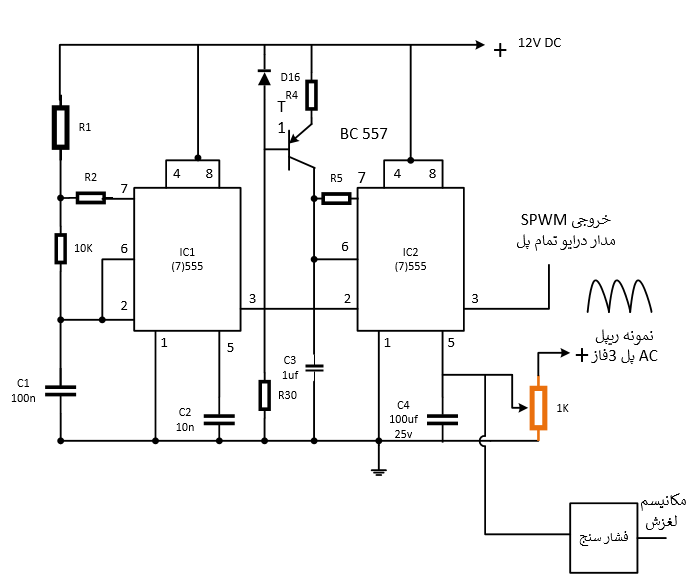
شکل 4:مدار پردازنده اتوماتیک V/HZ (حلقه بسته)
در یک اینورتر از مدارات پیچیده تری برای کنترل دور موتور استفاده می گردد. مدار فوق یک مولد PWM ساده است که از یک زوج IC 555 استفاده می کند. IC1 فرکانس PWM را تولید می کند که با کمک R4 / C3 به امواج مثلثی در پین شماره 6 IC2 تبدیل می شود. این امواج مثلثی با ریپل موج سینوسی در پین شماره 5 IC2 مقایسه می شوند.
این نمونه ریپل ها با اصلاح جریان 3 فاز AC در یک موج 12 ولت AC بدست می آیند و برای پردازش مورد نیاز به پین شماره 5 IC2 تغذیه می شوند. با مقایسه دو شکل موج سینوسی سه فاز، SPWM با ابعاد مناسب در پین شماره 3 IC2 تولید می شود که به عنوان PWM درایو برای شبکه H-Bridge تبدیل می شود.
چگونه مدار V / Hz کار می کند
با خاموش کردن قدرت، خازن در پین شماره 5 ، با ارائه ولتاژ صفر در پین شماره 5 روشن می شود که کمترین مقدار SPWM را به مدار H-Bridge تبدیل می کند؛ که به نوبه خود موتور القایی را قادر می سازد با یک شروع نرم آرام به تدریج روشن کند. با شارژ این خازن، پتانسیل در پین شماره 5 بالا می رود که به طور متناسب SPWM را بالا می برد و موتور را قادر می سازد به تدریج سرعت خود را بدست آورد.
ما همچنین می توانیم یک مدار فیدبک تاکومتر را مشاهده کنیم که با پین شماره 5 IC2 نیز یکپارچه شده است. این تاکومتر سرعت روتور یا سرعت لغزش را رصد می کند و در پین شماره 5 IC2 ولتاژ اضافی ایجاد می کند.
اکنون با افزایش سرعت موتور، سرعت لغزش سعی می کند با فرکانس استاتور همگام شود و در این فرآیند شروع به افزایش سرعت می کند. این افزایش در لغزش القایی باعث افزایش ولتاژ تاکومتر به طور متناسب می شود که به نوبه خود باعث می شود IC2 خروجی SPWM را افزایش دهد و این به نوبه خود سرعت موتور را بیشتر می کند.
تنظیمات فوق سعی دارد نسبت V / Hz را نسبتاً ثابت نگه دارد تا جاییکه سرانجام SPWM از IC2 قادر به افزایش بیشتر نیست. در این مرحله سرعت لغزش و سرعت استاتور حالت پایداری به دست می آورند و این پایداری تا زمانی که ولتاژ ورودی یا سرعت لغزش (به دلیل بار) تغییر نکند حفظ می شود. در صورت تغییر، مدار پردازنده V / Hz دوباره وارد عمل می شود و تنظیم را برای حفظ پاسخ بهینه سرعت موتور القایی تنظیم می کند.
تاکومتر
مدار تاکومتر نیز می تواند به ارزانی با استفاده از مدار ساده زیر ساخته شود و با مدار مذکور یکپارچه شود:
شکل 5:مدار تاکومتر
نحوه اجرای کنترل سرعت
در پاراگراف بالا، فرایند تنظیم خودکار را توضیح داده شد که می تواند با ادغام فیدبک تاکومتر به یک مدار کنترل کننده SPWM تنظیم کننده خودکار دست یابد. چگونه می توان کنترل دور موتور با تغییر فرکانس انجام داد، که در نهایت SPWM را مجبور به رها کردن و حفظ نسبت صحیح V / Hz می کند. تمام آنچه رخ می دهد در یک مدار مشابه در اینورتر برای تغییر شکل موج خروجی با اعمال آن به IGBT در اینورتر است.
نمودار زیر مرحله کنترل سرعت را توضیح می دهد:
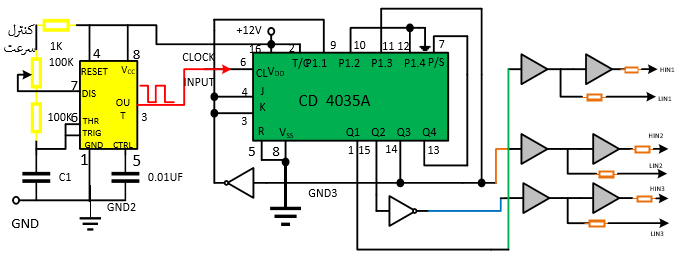
شکل 6:بلوک دیاگرام مراحل کنترلر سرعت موتور سه فاز
در اینجا می توان مدار ژنراتور 3 فاز با استفاده از IC 4035 را مشاهده کرد که فرکانس شیفت فاز با تغییر ورودی ساعت در پین شماره 6 آن قابل تغییر است. سیگنال های 3 فاز برای تولید HIN ،LIN مورد نیاز برای شبکه درایور پل کامل از طریق گیت های 4049 IC استفاده شده است. این بدان معناست که با تغییر مناسب فرکانس سرعت گیت های IC 4035، می توان فرکانس 3 فاز کارکرد موتور القایی را بطور مؤثر تغییر داد.
این از طریق یک مدار پایدار IC 555 ساده قابل اجراست که فرکانس قابل تنظیم را در پین شماره 6 IC 4035 تغذیه می کند و اجازه می دهد تا فرکانس از طریق 100K پیوست تنظیم شود. ظرفیت خازن C باید محاسبه شود تا محدوده فرکانس قابل تنظیم در مشخصات صحیح موتور القایی متصل قرار گیرد.
هنگامی که دیافراگم فرکانس متغیر است، فرکانس مؤثر موتور القایی نیز تغییر می کند که به همین ترتیب سرعت موتور را تغییر می دهد.
به عنوان مثال وقتی فرکانس کاهش می یابد، باعث کاهش سرعت موتور می شود که به نوبه خود باعث می شود که خروجی تاکومتر ولتاژ را به صورت نسبی کاهش دهد.
این کاهش نسبی در خروجی تاكومتر، SPWM را مجبور به كاهش و در نتیجه خروجی ولتاژ به موتور را به صورت نسبی پایین می آورد. این عمل به نوبه خود تضمین می کند که نسبت V / Hz در هنگام کنترل سرعت موتور القایی از طریق کنترل فرکانس حفظ می شود.